Printable Version of Topic
Click here to view this topic in its original format
Unmanned Spaceflight.com _ MSL _ MSL development & assembly
Posted by: climber Mar 29 2010, 08:11 PM
In case you missed it there's 9 minutes on MSL (actual hardware visible) + 5 minutes with Dr Elachi on "This week in Space" there: http://www.spaceflightnow.com/
14 minutes out of 23 regarding Unmanned, not bad.
Posted by: punkboi May 21 2010, 01:12 AM
Looks like NASA is planning to launch MSL between Nov. 25 and Dec. 18, 2011
http://www.jpl.nasa.gov/news/news.cfm?release=2010-171&cid=release_2010-171
Posted by: punkboi Jun 2 2010, 07:32 AM
High Gain Antenna for the Curiosity rover is en route to JPL
http://www.satnews.com/cgi-bin/story.cgi?number=525858649
Posted by: punkboi Jun 12 2010, 01:33 AM
NASA Dryden Hosts Radar Tests for Next Mars Landing
http://www.jpl.nasa.gov/news/news.cfm?release=2010-197
Engineers with NASA's Jet Propulsion Laboratory, Pasadena, Calif., are running diverse trials with a test version of the radar system that will enable NASA's Mars Science Laboratory mission to put the Curiosity rover onto the Martian surface in August 2012.
One set of tests conducted over a desert lakebed at NASA's Dryden Flight Research Center, Edwards, Calif., in May 2010 used flights with a helicopter simulating specific descent paths anticipated for Martian sites.
Posted by: climber Jun 12 2010, 07:44 AM
Very nice topic actually. BTW, do we know the dead line to get MSL sent to the Cape?
Posted by: punkboi Jun 12 2010, 06:11 PM
Spacecraft are usually sent to the Cape 3 months before launch...though in Spirit and Opportunity's case, they were delivered to Cape Canaveral 4-5 months before launch (January 2003, while Spirit launched in June and Opportunity launched in July of that year)
If MSL launches in November of 2011, then early summer going on the assumption above 
Posted by: ElkGroveDan Jun 12 2010, 07:14 PM
If they want a really robust test location to simulate unknown Martian landing conditions they should go to the desert areas in and around Joshua Tree National Park.
Posted by: nprev Jun 12 2010, 11:51 PM
Do we know the means by which MSL will be sent to the Cape yet (i.e., airlift or overland)?
Posted by: djellison Jun 13 2010, 12:05 AM
Oh - I don't think they've overlanded a spacecraft in years have they? Bound to be an airlift.
Posted by: nprev Jun 13 2010, 12:12 AM
For some reason, I thought that the MERs went overland. I know that JPL has (or had) a fairly robust overland transport infrastructure for moving spacecraft. (I think airlift's the way to go, though, definitely.)
Posted by: stevesliva Jun 13 2010, 01:35 AM

http://www.afrc.af.mil/news/story.asp?id=123137819
Googled around assuming it would be placed on a C-17. Bingo.
Posted by: Enceladus75 Jun 13 2010, 01:52 AM
Wasn't Galileo transported back and forth from the Cape to California via road overland? And wasn't the overland mode blamed for the removal of lubricant from that high gain antenna which never was able to open fully?
I would hope ALL deep space unmanned craft were transported to the launch site via airlift. And if not, by sea.
Posted by: nprev Jun 13 2010, 02:39 AM
I think Galileo actually went back & forth between the Cape & JPL several times due to launch delays, and that eventually hosed the lubricant.
Very happy to hear that MSL's definitely flying; a C-17 is a nice, safe, smooth ride!
Posted by: centsworth_II Jun 13 2010, 02:59 AM
"At 5 A.M. on February 22, 2003, a truck convoy left JPL, carrying the MER-2 rover to Florida. In a nice dramatic touch, a magnitude 5.4 earthquake hit southern California just forty minutes before the trucks rolled..."
Posted by: nprev Jun 13 2010, 04:26 AM
Probably. Time to reread that anyhow; thanks for the reminder $0.02!
Posted by: MahFL Jun 14 2010, 01:53 PM
What is the actual size of the HGAS ?
Posted by: djellison Jun 14 2010, 03:18 PM
HGAS?
Posted by: PDP8E Jun 14 2010, 04:50 PM
High Gain Antenna System????????? (thats all I have)
Posted by: StevenLee Jun 19 2010, 04:14 AM
Good call, ElkGroveDan. After Rogers, we continued helicopter radar testing over Amboy Crater and Cadiz Sand Dunes about 50 miles north of Joshua Tree. Amboy has morphology (terrain shapes) similar to Eberswalde Crater and Mawrth. Cadiz Sand Dunes allowed us to test the radar over more "fluffy" terrain to make sure it doesn't absorb or otherwise dillute the radar beams (we found it doesn't). We also flew over Death Valley which has terrain similar to what we see from MRO images of Holden Crater and Eberswalde Crater. It also contains "Mars Hill" which has rock distributions strikingly like some sites on Mars (it looks a lot like the the Viking 2 site at Utopia Planitia).
- Steve
(BTW, I'm the GN&C manager for MSL)
Posted by: ElkGroveDan Jun 19 2010, 04:30 AM
Great to have you aboard Steven. I tried to stop by Amboy with Doug Ellison last year but in the two decades since I went there on a geology field course the Park Service has closed off the road to the crater leaving only a foot trail and the sun was going down. But we did make it to Mars Hill the next day. Funny you would mention Cadiz. When Spirit first began looking back from Larry's Lookout it reminded me of the view from the hills above Cadiz. I would imagine that a jaunt up the Western side of the Owens Valley with all that fractured basalt and the number of cinder cones would provide for some challenging terrain for the radar too.
Please drop back in every now and then when you can and let us know how it's all going.
Posted by: djellison Jun 19 2010, 05:57 AM
For those wanting the soft squishy counterpart to the crunch radar targets....
Parachute testing up at the 120ft Wind Tunnel
Part 1
http://www.youtube.com/user/JPLnews#p/u/4/O7vf2HUMMdo
2
http://www.youtube.com/user/JPLnews#p/u/3/JRRcbZlofOk
3
http://www.youtube.com/user/JPLnews#p/u/2/-NJamPhtRjA
And my personal favorite - proving that Engineers are people to...Part 4
http://www.youtube.com/user/JPLnews#p/u/1/J6TceTZq1L0
The high-speed photography of chute deployment is a beautiful organic flowing rippling sea-creature like event that is worth watching on its own. Stunning.
Posted by: Sunspot Jun 30 2010, 09:48 PM
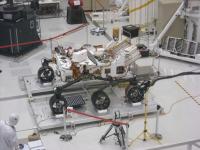
MSL with wheels attached
http://www.aviationweek.com/aw/blogs/space/index.jsp?plckController=Blog&plckBlogPage=BlogViewPost&newspaperUserId=04ce340e-4b63-4d23-9695-d49ab661f385&plckPostId=Blog%3a04ce340e-4b63-4d23-9695-d49ab661f385Post%3a7c02ba95-d993-461c-bf9c-b93abba28514&plckScript=blogScript&plckElementId=blogDest
Posted by: James Sorenson Jul 1 2010, 01:15 AM
It looks so mean, and ready to take on anything that gets in its way
Posted by: MahFL Jul 1 2010, 01:04 PM
"Weighing almost a ton, the nuclear-isotope-powered is set for launch in the fall of next year, with landing on Mars almost a year after that."
They missed a word out in that scentence, and aren't they supposed to be using tonnes ?............. 
Posted by: charborob Jul 1 2010, 06:23 PM
Let's just hope it can negotiate sand traps. I wonder if they tested it in soft ground.
Posted by: punkboi Jul 1 2010, 08:20 PM
The wheels were installed onto Curiosity on June 28 and 29. Unless problems crop up during testing that would cause them to be removed again, the wheels are now permanently attached to the rover.
http://www.nasa.gov/mission_pages/msl/msl20100701.html
Posted by: James Sorenson Jul 2 2010, 12:04 AM
Good point. Of coarse they wouldn't test the flight model, but I hope they have tested it with an engineering model to see how it does in soft soil. The wider wheels on MSL should help quite abit.
Posted by: helvick Jul 2 2010, 12:20 AM
Doug commented on http://www.unmannedspaceflight.com/index.php?s=&showtopic=2031&view=findpost&p=36278 - MSL should be better able to deal with soft terrain than the MER's. It may be bigger but its weight is distributed over a proportionally larger contact area.
Posted by: MahFL Jul 2 2010, 11:46 AM
I doubt there can ever be a wheeled vehicle that cannot be trapped in some hellish sand trap. No doubt the drivers though will be very carefull.
Posted by: helvick Jul 2 2010, 06:31 PM
That's very true but MSL has the benefit of the incredible expertise that has been acquired through the MER's - being careful goes without saying but that expertise is also invaluable. I'm not worried about sand or any other obstacles on the ground - EDL is what I'm saving all my worries for.
Posted by: tharrison Jul 2 2010, 06:36 PM
Well, the drivers were the ones that got Spirit stuck...the science team folks told them not to drive in the sandy area where it got stuck but they did it anyway.
Posted by: MahFL Jul 6 2010, 02:46 PM
Can you supply a reference to backup that statement ?
Posted by: BrianL Jul 8 2010, 10:38 PM
Would you ask Scott Maxwell for a reference every time he tweets something? Insider info is good enough for me. I guess I'm just a trusting soul.
Posted by: sgendreau Jul 9 2010, 05:29 PM
The drivers can overrule the science team when deciding where to go? How's that?
Posted by: punkboi Jul 9 2010, 07:10 PM
Safety reasons. The drivers are obviously the ones controlling the vehicle. They should call the shots. (Though this goes against what tharrison posted above.
 )
)Much as how a landing site (for Phoenix, MER, MSL or whatever) that's proposed by the science team can be disapproved by the engineering team if the site is deemed too hazardous.
Posted by: elakdawalla Jul 9 2010, 07:32 PM
If you read http://marsandme.blogspot.com, you'll get a feel for how the scientists' job is to pick destinations, not routes; the drivers' job is to route the rover to the destination safely -- or to tell the scientists it can't be done because it can't be done safely. If you read Scott's blog you'll also get a feel for how much he hates to say things can't be done. If there's a way to do it safely, they'll find it. But then it may take too much time and the scientists will decide it's not worth it. There is a great deal of give-and-take in the daily process of planning the rovers' driving.
Posted by: djellison Jul 9 2010, 08:19 PM
Worth noting in the case of spirit - Scientists have explicitly said that they didn't see Spirit's current sand trap coming.
Posted by: nprev Jul 10 2010, 12:55 AM
One other thing worth noting: This is no-kidding exploration of an alien planet in its purest sense, and the MERs have not only survived long beyond expectations but surmounted numerous unexpected obstacles. This does not presuppose a magic ability to see things coming in an alien environment, but does speak volumes about the talent of the team.
Hell, if I was driving the MERs we'd have been lucky to get off the descent stages, and I'd probably have a couple of DUIs! 
Posted by: Mirek Jul 13 2010, 08:28 PM
MSL spins its wheels for the first time (July 9th 2010).
http://tinyurl.com/2ej2l26
Posted by: nprev Jul 14 2010, 12:21 AM
Awesome. She's looking like a no-kidding rover now!!!
Question: What's the deal with the wheels re that one region on each that has no tread, just connecting strips + holes? Is that for mass savings, or perhaps an artifact of the fabrication process, or is there an operational reason?
Posted by: ElkGroveDan Jul 14 2010, 01:24 AM
I was under the impression that like the MERs, the interrupted tread pattern was for optical navigation purposes but I can't cite the source of that information offhand.
Posted by: nprev Jul 14 2010, 01:44 AM
Sounds logical. I'm kind of surprised at the size of the holes, though; definitely a major decrease in surface contact area over, what, maybe 30 deg of the circumference?
Obviously there's more than enough margin, though; if one wheel slips, odds are that all the rest won't have their holed regions on the surface at the same time.
Posted by: Pavel Jul 14 2010, 02:10 AM
I guess martian rocks would eventually get stuck in the holes and increase the surface contact area
Posted by: toddbronco2 Jul 14 2010, 03:22 PM
Question: What's the deal with the wheels re that one region on each that has no tread, just connecting strips + holes? Is that for mass savings, or perhaps an artifact of the fabrication process, or is there an operational reason?
You guys are going to love this (I was clued into it by a guy on the MSL ATLO team)! There's a Morse code message hidden in those gaps. The video shows it pretty clearly too, though I guess the pattern is backwards if you look at the rover from the front
.---
.--.
.-..
Posted by: charborob Jul 14 2010, 04:03 PM
Unnecessary quote removed Admin
Translation: "JPL".
Posted by: djellison Jul 14 2010, 04:19 PM
That's quite a giggle for those that remember the wheels on the MSL Scarecrow mobility model - check the tread on that
http://www.planetary.org/blog/article/00001010/
Posted by: sgendreau Jul 14 2010, 11:27 PM
.--.
.-..
That rocks.

(Oh, and it rolls.) [ducks]
Posted by: nprev Jul 14 2010, 11:57 PM
LOVE it!!!
Posted by: punkboi Jul 16 2010, 05:20 AM
MSL now has her Remote Sensing Mast

|
Posted by: James Sorenson Jul 18 2010, 04:06 AM
Can't wait till we get higher res pics of the New mast. Ohh and a clean room panorama of the rover taken by Mastcam's perspective .
Posted by: punkboi Jul 20 2010, 06:10 AM
http://www.jpl.nasa.gov/news/news.cfm?release=2010-239&cid=release_2010-239
Video Camera Will Show Mars Rover's Touchdown
July 19, 2010
A downward-pointing camera on the front-left side of NASA's Curiosity rover will give adventure fans worldwide an unprecedented sense of riding a spacecraft to a landing on Mars.
The Mars Descent Imager, or MARDI, will start recording high-resolution video about two minutes before landing in August 2012. Initial frames will glimpse the heat shield falling away from beneath the rover, revealing a swath of Martian terrain below illuminated in afternoon sunlight. The first scenes will cover ground several kilometers (a few miles) across. Successive images will close in and cover a smaller area each second.
Posted by: climber Jul 20 2010, 08:57 AM
Weeks or months to get the full resolution video.
I can't wait for Dan Maas animation.
Posted by: ustrax Jul 20 2010, 09:56 AM
Madrecita de Dios!

How many sols left for total aweness?
Posted by: djellison Jul 20 2010, 01:36 PM
Dan's not doing this one - but an updated version of the MSL animation that already exists is in production.
Posted by: punkboi Jul 21 2010, 07:01 PM
Looking forward to the new MSL video. Dan Maas' video for Phoenix was awesome
Posted by: djellison Jul 23 2010, 04:06 AM
http://www.ustream.tv/nasajpl
Tune in tomorrow from 11 - 3 PST. Live from the clean room, should be worth watching!
Posted by: toddbronco2 Jul 23 2010, 03:01 PM
THe video streaming today is occurring because the plan is to drive the rover on the floor for the first time this afternoon.
Posted by: djellison Jul 23 2010, 05:22 PM
Live a bit early - http://www.ustream.tv/nasajpl
First drive expected at about 2pm
Posted by: punkboi Jul 23 2010, 07:28 PM
Another pic of MSL with its new "neck and head"
http://twitpic.com/27xag9
Posted by: punkboi Jul 23 2010, 09:38 PM
Curiosity Rover Grows by Leaps and Bounds
The full version of this story with accompanying images is at:
http://www.jpl.nasa.gov/news/news.cfm?release=2010-245&cid=release_2010-245
Talk about a growth-spurt. In one week, Curiosity grew by approximately 1 meter (3.5 feet) when spacecraft technicians and engineers attached the rover's neck and head (called the Remote Sensing Mast) to its body. At around 2 meters (about 7 feet) tall, the next rover to Mars now stands head and shoulders above the rest.
Mounted on Curiosity's mast are two navigation cameras (Navcams), two mast cameras (Mastcam), and the laser-carrying chemistry camera (ChemCam).
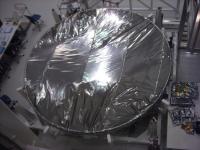
While it now has a good head on its shoulders, Curiosity's "eyes" (the Mastcam), have been blindfolded in a protective silvery material. The Mastcam, containing two digital cameras, will soon be unveiled, so engineers can test its picture-taking abilities.
Up next today (July 23), the towering rover will take its first baby steps: a slow roll on the floor of the clean room where it's being built at NASA's Jet Propulsion Laboratory, Pasadena, Calif. Watch Curiosity's progress live from the clean room on Ustream until 3:30 p.m. PDT today: http://www.ustream.tv/nasajpl .
Posted by: sgendreau Jul 23 2010, 10:12 PM
Wow...it works!
(watching http://www.ustream.tv/nasajpl)
Posted by: nprev Jul 23 2010, 11:10 PM
All good till she tried to turn-in-place; no-go.  Doubtless a minor problem, and that's exactly what testing's for!
Doubtless a minor problem, and that's exactly what testing's for!
Posted by: Ant103 Jul 23 2010, 11:15 PM
Anyway, that was a very nice live coverage of this event, like the very first steps of a baby
Pretty incredible to see Curiosity moving. Hope there will more coverage like this in future.
Posted by: punkboi Jul 24 2010, 12:56 AM
Props to Emily for capturing Curiosity's baby steps and turning 'em into an animated GIF
http://www.planetary.org/blog/article/00002597/
Posted by: Stu Jul 24 2010, 12:37 PM
http://cumbriansky.wordpress.com/2010/07/24/curiosity-takes-her-first-baby-steps
Great night's viewing!
Posted by: AndyG Jul 24 2010, 03:03 PM
^ Nice piece, Stu.
Dumb question I can't find an answer for: is the RTG currently on the back of MSL a correct-weight mock-up for these experiments, given there's a substantial cable connected to Curiosity, and - if so - when does the real one get fitted?
Andy
Edited for typo
Posted by: ElkGroveDan Jul 24 2010, 03:39 PM
Everything is so out of whack with respect to the weight when you consider that they are testing in 1.0g something meant to operate in 0.37g, what equipment is on or not on the vehicle is mostly irrelevant. I'm sure there's a whole lot of equipment either dummied-up or missing entirely. Ultimately they know the total wight of the vehicle during the testing and if it's a load-critical test they make certain that the weight is 0.37 of the fully assembled vehicle. Stripping off components is one way to do that (attaching helium balloons might be another
) so removing the RTG or its mock-up twin would make a lot of sense. The cable is probably a minor consideration but could be easily taken into account.
Posted by: djellison Jul 24 2010, 04:12 PM
There isn't an RTG of any sort fitted on the back right now. Weight corrected or otherwise. What you're seing is the radiator fins. The gap between them is where the RTG goes.
And these tests are only an experiment in so far as making sure everything works. There is the scarecrow MSL that is literally just suspension and an electronics box for the purpose of mobility testing with an equiv 1/3rd mass.
There will be a model of the RTG fitted for thermal-vac testing I would guess, but the real one will not get fitted - as with Cassini and New Horizons - until it's on the rocket read for launch. There will be a door on the rockets fairing and there's a door on the back of the backshell to let them insert it into the back of the rover whilst in the fairing on the Atlas V in Florida.
Posted by: nprev Jul 25 2010, 12:46 AM
Huh. Is that standard procedure for RTGs? Seems like a fair amount of added complexity; that's a tight space for all the inspections, close-outs, etc. to happen, besides the fact that they'll be doing it high off the ground.
Posted by: djellison Jul 25 2010, 01:15 AM
Well - Cassini did it, NH did it, MSL will do it - I'd called it standard procedure to be honest.
Posted by: nprev Jul 25 2010, 03:28 AM
Yeah, that would meet the definition. Never knew that; cool.
Posted by: brellis Jul 25 2010, 03:50 AM
Just to consider that they've kept all that stuff 'clean' is amazing, let alone transportation issues.
Posted by: punkboi Jul 25 2010, 04:22 AM
Never knew that; cool.http://mediaarchive.ksc.nasa.gov/detail.cfm?mediaid=27823
http://mediaarchive.ksc.nasa.gov/detail.cfm?mediaid=27824
http://mediaarchive.ksc.nasa.gov/detail.cfm?mediaid=27825
http://mediaarchive.ksc.nasa.gov/detail.cfm?mediaid=27826
http://mediaarchive.ksc.nasa.gov/detail.cfm?mediaid=27827
Photos of the RTG being installed onto New Horizons inside Atlas V's payload shroud
Posted by: monty python Jul 25 2010, 06:18 AM
I would think an RTG would release quite a bit of heat.
The wikipedia entry for RTG's quite interesting. They are not very efficient so to generate 300 watts I'm thinking WARM! They say in the USSR they had some remote lighthouses powered by RTG's. One winter night some people found one of these and gathered around it for warmth.
They also say the radiation degrades the materials that convert heat to electricity so maybe they keep them separate until shortly before launch.
Brian
Posted by: Mirek Jul 25 2010, 07:38 AM
Funny video of one of the engineers doing Robot Dance in front of MSL:
http://tinyurl.com/32k9uc6
P.S. It was me who asked him to do that.
Posted by: punkboi Jul 25 2010, 07:55 AM
http://tinyurl.com/32k9uc6
P.S. It was me who asked him to do that.
Funny video. Hopefully all of you JPL folks will have a much bigger reason to do the Robot Dance in November '11 and then August of '12
Posted by: Stu Jul 25 2010, 09:40 AM
Haha! I remember, I was with you in the "audience" in the Ustream chat room, watching. (Which was a GREAT event, BTW; anyone who missed it should try to make the next one. Thanks to JPL for letting us watch, much appreciated!)
Those techs really joined in with the spirit of things, didn't they? (maybe it was just a way of coping with the nerves!) I was still hoping they'd all gather around the rover and put on a performance of "Greased Lightning", but maybe next time...
Posted by: Drkskywxlt Jul 28 2010, 06:26 PM
Just attended a talk by Sylvestre Maurice, deputy PI for ChemCam. Some interesting facts:
- ChemCam is planning to zap 7-20 targets per day for the entire 2 Earth-year mission (!!!!)
- ChemCam sees alkali metals extremely well and the transitional metals and other metals reasonably well
-- It has a harder time (but doable) with H, C, O, N, P, S, Si ...those elements need .5-10% by weight fractions of the zapped rock to be identified. He said they need 3-5% for C, in particular, depending on range.
-- They can't get any of the noble gases (but who cares?) or F and unfortunately, they can't get Cl at all. APXS will have to look for Cl
- They're operational range is 1.5-7m
-- It would take double the power to extend it to 9m, which was their initial goal
- They added a cooler to their body unit, because the heat from the RTGs would have been too much for it to handle. They were in an awkward spot for awhile where the mast-mounted laser wasn't going to work well when it was too cold, while the body unit was going to be too hot! He feels confident the electric cooler resolves this.
Posted by: Stu Jul 28 2010, 08:57 PM
Some memories of a fun evening watching Ustream with fellow rover-huggers!
http://astropoetry.wordpress.com/2010/07/28/first-drive
Posted by: MahFL Jul 29 2010, 02:08 PM
- ChemCam is planning to zap 7-20 targets per day for the entire 2 Earth-year mission (!!!!)
Frankly that does not sound posssible.
Posted by: Drkskywxlt Jul 29 2010, 02:53 PM
Yeah, that kind of blew me away as well. I looked into detail on ChemCam's documentation available online, and it corroborates his statement saying "~15 targets" per day.
It seems that such frequent use of a complicated system in a harsh near-vacuum environment would eventually degrade it to uselessness.
Posted by: ugordan Jul 29 2010, 03:08 PM
As opposed to any other system that is somehow immune to degradation?
Posted by: djellison Jul 29 2010, 04:18 PM
How, exactly?
Posted by: Drkskywxlt Jul 29 2010, 04:27 PM
No doubt the other systems are complex too...just seems that an operating laser might even be beyond what's already flown. It is the first LIBS instrument to ever fly. He already said that severe cold might limit/halt operations to the mast-mounted unit.
Posted by: ugordan Jul 29 2010, 04:32 PM
So how does severe cold play into the usage frequency, or alternatively, why would one want to spare an instrument of frequent usage if it's more prone to failure in the first place? I say use it while you can to the fullest extent possible. Extended missions are gravy, but shouldn't be primary mission decision drivers.
Posted by: Drkskywxlt Jul 29 2010, 04:39 PM
He didn't go into specifics. He said the cold limits the mobility of the mast and would narrow/eliminate their targeting thusly. I'm speculating with what affect it will have long-term. The primary mission is 2 Earth years long! So, that works out to 2555-7300 targets, each of which will include ~20-50 laser pulses. That's a lot of operation!
Posted by: djellison Jul 29 2010, 09:09 PM
So you think they're using it too quickly? Where is your MTBF number to suggest that's the case? 500,000 pulses is 'a lot of operation' ?
MOLA fired 390,000,000+ times in its primary mission.
What is it that makes you think the ChemCam team are going to do more with the laser than it is designed to do, or that they have designed it to do less than is required?
In short - what are you going on about?
Posted by: Drkskywxlt Jul 29 2010, 11:17 PM
I admire their confidence. I hope it's warranted. I have no technical expertise to cast doubt on it.
If I were in their shoes, I'd have to be supremely confident to set my mission baseline at sampling so many targets. I'd rather aim lower, particularly with a never-flown before instrument and then have it overperform. Same way the MERs were only baselined for 600m and 3 months. Steve Squyres himself said in his book he thought they'd be able to go longer, but didn't want to oversell.
MOLA is not in the same class as ChemCam. MOLA had a much higher TRL when it flew with a long heritage. Although LIBS technology is well established, it has never flown in space before.
Posted by: ugordan Jul 29 2010, 11:42 PM
The point is, what makes you think they aren't being conservative in their estimates?
So why do it in the first place, then?
Posted by: Drkskywxlt Jul 30 2010, 12:21 AM
Maybe they are. Each target obviously takes time to identify, prepare the system, fire, analyze the results, possibly fire again (the first firing might be to remove dust), analyze again, and then move in closer for APXS or other instrument analysis. Some targeting apparently will be autonomous. Only so many hours in a day though.
To make conversation. I want to see if someone knows better. If no one does, we can have the conversation.
Posted by: djellison Jul 30 2010, 12:25 AM
Why are you assuming they'll move in and APXS every ChemCam target?
Posted by: Drkskywxlt Jul 30 2010, 12:43 AM
They won't. Didn't mean to give that impression. But, ChemCam is serving as a target ID'er for APXS, SAM, and Chemin.
Posted by: hendric Jul 31 2010, 02:05 AM
Did they mention how they're going to handle dust on the optics? A laser powerful enough to vaporize rock is going to vaporize any dust on the optics as well. That's probably not a good thing.
Posted by: Syrinx Aug 1 2010, 10:30 PM
Jen Blank presented information about ChemCam at Seti Institute two months ago. The video is here:
http://www.youtube.com/setiinstitute#p/u/11/887bilE-C4s
I can't remember if she addressed the questions posed in this thread, but I do remember the talk being informative.
Posted by: Mirek Aug 21 2010, 12:38 AM
Curiosity's Robotic Arm attached:
Video: http://www.jpl.nasa.gov/video/index.cfm?id=927
Posted by: nprev Aug 21 2010, 01:05 AM
Glad to see her coming together so well!
Late comment on duty cycles for complex systems: Ask any aircraft mechanic anywhere in the world how planes behave if they sit idle for too long; you'll get an earful.
My guess is that near-continuous operation of a system within normal parameters (vs. near upper tolerances, as is often necessary with high-current devices) actually reduces the likelihood of malfunction since the individual components are subjected to their designed operational loads & environment (thermal being probably the most significant) as well as generally steady inputs from interfacing devices.
What frequently kills integrated systems are abrupt transients (mechanical & electrical), and those are more likely to arise due to subtle, often random, changes in the performance of individual components that occur for a variety of reasons as a result of prolonged periods of inactivity.
Posted by: Juramike Sep 3 2010, 04:36 PM
Some really beautiful pictures of MSL cruise stage testing:
http://www.flickr.com/photos/nasa-jpl/4954650670/in/photostream/
http://www.flickr.com/photos/nasa-jpl/4954650670/in/photostream/
(I love the lighting!)
Posted by: punkboi Sep 14 2010, 05:31 AM
NASA's Next Mars Rover Rolls Over Ramps
http://www.jpl.nasa.gov/news/news.cfm?release=2010-297
Posted by: climber Sep 14 2010, 09:23 PM
Thanks + I see there'll be a "A public lecture by Mars Science Laboratory Chief Scientist John Grotzinger, of the California Institute of Technology in Pasadena, will take place at JPL on Thursday, Sept. 16, beginning at 7 p.m. PDT Time (10 p.m. EDT). Live video streaming, supplemented by a real-time web chat to take public questions, will air on Ustream at http://www.ustream.tv/channel/nasajpl"
Posted by: djellison Sep 14 2010, 10:00 PM
I'm going to go to the PCC one on the Friday.
Posted by: punkboi Sep 16 2010, 07:34 PM
Five Things About NASA's Mars Curiosity Rover
http://www.jpl.nasa.gov/news/news.cfm?release=2010-302
One error I found in this article is Pathfinder being called Curiosity's rover predecessor. Pathfinder is obviously the lander. Sojourner should've been listed.
Posted by: James Sorenson Sep 17 2010, 07:30 PM
I am not sure how long these have been up, or if anyone has noticed, but there are two Mastcam 100mm images taken with I assume an engineering version outside, with an image in bayer color and through an IR filter on the science corner website. Sadly, they are not full res. One can just imagine those images taken on Mars though
http://msl-scicorner.jpl.nasa.gov/Instruments/Mastcam/
Also I might point out, there is also some nice pictures of MARDI attached to the rover on the MARDI page.
Posted by: djellison Sep 17 2010, 08:00 PM
There's a test image here
http://www.msss.com/news/index.php?id=14
And for MAHLI
http://www.msss.com/science/msl-mahli-pre-launch-images.php
And MARDI
http://www.msss.com/science/msl-mardi-pre-launch-images.php
And I just learnt that, like MastCAM and MARDI - MAHLI can record video as well.
http://www.msss.com/msl/mahli/references/Edgett_etal_MarsMicro.pdf
Posted by: hendric Sep 17 2010, 08:08 PM
Pretty neat idea, using the "leaky" IR range of the Bayer filters to get IR on an RGB camera. Would there be any advantage to a R-G-B-Clear filter pattern?
Posted by: SpaceListener Sep 18 2010, 02:37 AM
http://www.marsdaily.com/reports/Strong_Robotic_Arm_Extends_From_Next_Mars_Rover_999.html
An improvement from MER by its greater versatility with mechanisms for scooping, sieving and portioning samples.
Posted by: tharrison Sep 20 2010, 04:27 PM
http://www.msss.com/news/index.php?id=14
And for MAHLI
http://www.msss.com/science/msl-mahli-pre-launch-images.php
And MARDI
http://www.msss.com/science/msl-mardi-pre-launch-images.php
I've updated these pages so that the links to the full-res versions are now working (in addition to my CTX/MARCI operations duties, I'm also one of the MSSS webmasters as we try to migrate the old website over to a more modern-looking interface). This morning I also posted an updated page of Mastcam pre-launch images and video:
http://www.msss.com/science/msl-mastcam-pre-launch-images.php
Enjoy!
~Tanya
Posted by: djellison Sep 20 2010, 05:20 PM
I almost miss the old-school MSSS website - it takes me back to 1997 all over again.
But on the upside - a huge thanks the the additional content, amazing to see MastCAM video
Posted by: stevesliva Sep 20 2010, 06:03 PM
Really, you must incorporate an HTML table with fat borders just for nostalgia. I'll forgive you for dropping serif fonts. sigh.
Posted by: James Sorenson Sep 20 2010, 07:20 PM
Very nice images AND VIDEO!! . I am wondering if there is any particular technical reason for the vignetting in the corners of Mastcam? I have noticed in the side shots with the famous swiss army knife, that on the front of the lens assembly's, there are protruding tabs or some sort in all four corners on both camera's. Is this intentional?
Posted by: tharrison Sep 21 2010, 04:18 PM
. I am wondering if there is any particular technical reason for the vignetting in the corners of Mastcam? I have noticed in the side shots with the famous swiss army knife, that on the front of the lens assembly's, there are protruding tabs or some sort in all four corners on both camera's. Is this intentional?The vignetting is due to the filter wheel. The Mastcam CCD is 1600x1200, but the intention has always been to only send back a 1200x1200 portion such that we're not wasting bits sending back the parts of the image affected by vignetting.
Someday we should auction off that "famous" Swiss army knife on eBay or something...
Posted by: ElkGroveDan Sep 21 2010, 07:21 PM
this past Friday (Sept 17, 2010)....
|

|

|
|

|
Posted by: climber Sep 21 2010, 07:41 PM
Lucky man!
But make sure you check Emily's entry here: http://www.planetary.org/blog/article/00002675/
Posted by: punkboi Sep 21 2010, 07:50 PM
Nice photos... Pretty interesting that they already uninstalled Curiosity's robotic arm
Posted by: djellison Sep 21 2010, 08:06 PM
For those wondering - I think they're doing something with MARDI during those tests - that spot pattern is right underneath it.
Posted by: punkboi Sep 22 2010, 09:55 PM
ChemCam instrument delivered to JPL for installation onto Curiosity
http://www.jpl.nasa.gov/news/news.cfm?release=2010-310
Posted by: Oersted Sep 22 2010, 11:18 PM
But make sure you check Emily's entry here: http://www.planetary.org/blog/article/00002675/
Whoa, in that video about the wheels they are saying that the aluminium they're made of only has the thickness of seven pieces of paper! So the aluminium wheels are actually "springy" and flexible, and that is part of the suspension system! - Amazing.
Posted by: climber Sep 22 2010, 11:30 PM
...and they rely on this system for landing!
Vertical velocity at landing is going to be very close to zero, I'd say...and I'm more concerned by horizontal velocity. I quite do not understand yet how the crane works in this respect. I don't think they are going to use the rude retro rocket system used on MER?
Posted by: djellison Sep 22 2010, 11:51 PM
The MER wheels are designed to be slightly flexible as well. It helps just take the edge of the worst of the jarring from driving over rocks ( if you remember Emily's videos of the MSL Scarecrow driving around the remodelled Mars Yard....there are thuds and drops and bangs and crunches)
And despite the MER wheels being designed with that flight flex, I've seen a grown man stand on one on one leg and do everything short of jump up and down on it.
Which bit of the crane don't you understand? The radar can identify and then use the liquid rockets to zero-out the horizontal velocity. Think of the Phoenix landing. Now instead of stopping at an altitude of 0 metres, you just stop slightly higher whilst lowering the rover on the bridle.
Posted by: climber Sep 23 2010, 03:29 AM
Thanks Doug for clarification.
I was refering to the video as well were we can see the landing simulations. My feeling was that, if vertical velocity was relatively easy to control using the bridle, horizontal velocity was harder to manage because of wind or pendulum effect....so stressing the boogy system in the "wrong" axis.
Posted by: MahFL Sep 23 2010, 11:18 AM
Wow they have some big wheel tie downs on Curiosity.
Posted by: djellison Sep 23 2010, 01:31 PM
Curiosities wheels are not tied down.
Until the skycrane maneuver, the wheels are infact bolted 'up' onto brackets extending out from the rover chassis itself that tie in to the top of the suspension system just inboard of the front and rear wheels.. Then as it drops from the backshell on the ropes, they wheels are deployed. The holes in the wheels are to let the dust and pebbles out, and to leave marks in the soil for slip checking.
Posted by: centsworth_II Sep 23 2010, 05:50 PM
I have to admit, the open architecture of the wheels made me a little nervous when I first saw it, thinking of potato -- and larger -- size rocks moving in and out and through the wheels as the rover rolls along. I guess it's better than moving in and not out.
But really, deep inside me something cries out for hubcaps. (I never said my guts were an expert rover designer.)

Posted by: Paolo Sep 23 2010, 07:13 PM
A bit OT...
It has been pointed out in a French astronautics forum that this image of a "skycrane" was published in Courtlandt Canby's "A History of Rockets and Space" in 1964!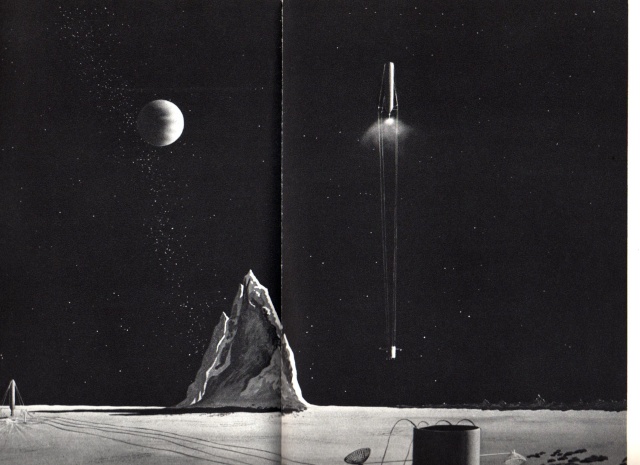
Posted by: MahFL Sep 24 2010, 12:36 PM
I was indeed referring to the red straps in the clean room, I saw 2 of them.
Posted by: djellison Sep 24 2010, 04:00 PM
They are just to hold it onto that inclined stand so they could do arm tests with the rover tilted over without the rover moving.
Rule of thumb... Bright red stuff is remove-before-flight.
Posted by: Oersted Sep 25 2010, 05:59 PM
That is a delightful image Paolo! - I guess now the race is on to find even earlier space sky-crane illustrations
Posted by: climber Sep 30 2010, 08:24 PM
I was looking for differences between MSL's MARDI and Phoenix's. Regarding microphone, we know that Phoenix MARDI microphone was not purpose-built to record sounds on Mars... but I can't get back the answer why it was there for and/or why there is none on MSL?
Posted by: elakdawalla Sep 30 2010, 08:49 PM
Phoenix MARDI microphone was there because its electronics were off-the-shelf and designed for cell phone applications, so the electronic board also happened to carry microphone inputs. See http://www.planetary.org/news/2008/0918_Phoenix_Mission_Receives_OK_to_Listen.html. I don't think there's anything common between MSL and Phoenix MARDI except the name.
Posted by: James Sorenson Oct 8 2010, 08:22 PM
SAM is completed, and ready to be installed into Curiosity.
http://www.nasa.gov/topics/moonmars/features/sam-configure.html
By the way, I'm wondering how they are going to install SAM without taking everything off the deck of MSL? Do they remove the bottom panel of the WEB and fit SAM in?
Posted by: djellison Oct 8 2010, 08:25 PM
Take the wheels off, flip the chassis over, take the bottom off, and install from, essentially, underneath.
Posted by: eoincampbell Oct 8 2010, 09:16 PM
Comparing these photos of SAM with the the diagram given here: http://msl-scicorner.jpl.nasa.gov/Instruments/SAM/ ,
is it "upside down" in the photo?
Posted by: djellison Oct 8 2010, 09:20 PM
Looks like it - the tunable laser and sample handing components are big, cylindrical and identifiable in the images and the cad rendering. I'd say the sample inlet is on the 'bottom' in those photos. Note the handling frame the instrument's mounted on - it's got a means to pivot the instrument over.
Posted by: punkboi Oct 21 2010, 06:44 PM
Watch live footage of Curiosity being assembled (or disassembled...as the wheels and robotic arm were removed again)
http://www.ustream.tv/nasajpl
Posted by: djellison Oct 21 2010, 06:44 PM
Actually - the rover's looking more rover-like than it did last week. Last week the mast was stowed, the rover was upside down and the belly pan was off
Posted by: punkboi Oct 22 2010, 06:28 AM
As of right now (11:28 PM PDT), engineers are still working on Curiosity. And a message at the top of the UStream page mentions that the wheels will go back on tomorrow
Anyword on the status of the zoom lens for MastCam? Will they be complete in time before the end of this year?
Posted by: elakdawalla Oct 22 2010, 04:18 PM
I understand they're working four shifts in order to get her ready for launch, so we should be seeing some kind of activity around the clock...
Posted by: nprev Oct 22 2010, 04:25 PM
Four? Interesting choice. I assume it's four 6-hr shifts, probably to reduce fatigue & therefore potential human error.
Posted by: centsworth_II Oct 22 2010, 08:13 PM
Or maybe 8hr shifts with 2hr overlap to ensure continuity in hand-off of tasks.
Posted by: djellison Oct 22 2010, 08:16 PM
Here's the view from the viewing gallery - camera about 6 inches from the webcam when i took it - gives you some context.
From left to right.....
Spin-balance table( black box )
Rover handling rig (white frames )
Arm pointed straight at you bolted to metal plate.
Rover ( pointing right, we're looking at it's right side)
Cruise stage in the back right corner, backshell infront of it, and descent stage in the foreground partially obscured by scaffolding.

|
Posted by: ElkGroveDan Oct 22 2010, 08:51 PM
Awesome, it's as if I was standing there in person.
Posted by: paxdan Oct 22 2010, 08:51 PM
Great pan Doug. Bonus points for identifying all the mission patches on the far wall.
Posted by: elakdawalla Oct 22 2010, 09:02 PM
I've just spent 15 minutes searching for the "rover family portrait" on JPL websites and can't seem to find it. The image is on Wikipedia here http://en.wikipedia.org/wiki/File:Mars_Science_Laboratory_mockup_comparison_.jpg but I'm looking for the original file as posted on a JPL site and cant' seem to see it anywhere...can anybody help me?
Posted by: djellison Oct 22 2010, 09:13 PM
http://photojournal.jpl.nasa.gov/catalog/PIA11431
Posted by: peter59 Oct 22 2010, 09:40 PM
Original file is on an old, abandoned branch of new MSL site:
http://mars.jpl.nasa.gov/msl/
Branch:
http://mars.jpl.nasa.gov/msl/spotlight/ was abandoned in 2009
Looking picture was published in 2008, unfortunately, the resolution is also low
http://mars.jpl.nasa.gov/msl/spotlight/features-2008.html
Posted by: elakdawalla Oct 22 2010, 09:51 PM
Thanks guys, I cannot figure out why that was not showing up in my searches. Friday afternoon
Posted by: punkboi Oct 22 2010, 09:59 PM
Kinda off-topic, but NASA JPL is closing the chat box on the Ustream page... Too many people going on a rant about what if NASA got the U.S. miltary's budget.. 
The robotic arm should be reattached next Monday, October 25
PS: I still didn't get an answer about the zoom lens' status for MastCam
Posted by: nprev Oct 22 2010, 10:20 PM
Sad. Another reminder of how valuable the UMSF forum guidelines really are, though.
Posted by: Stu Oct 22 2010, 10:27 PM
There are always some ****heads around who think it's funny or smart to ruin something different and interesting. Hopefully they'll get some Moderators on there soon who will just kick cretins' arses out as soon as they start playing up. Don't want what could grow into a fascinating window into the MSL mission ruined by a few Beavis nethead braindeads tapping away in their bedrooms.
Posted by: djellison Oct 22 2010, 11:05 PM
It's very simple. If it's ready in time, it's on. If it's not, it's not.
We should know by the New Year.
Posted by: nprev Oct 22 2010, 11:33 PM
I'll happily volunteer to be the MSL livechat enforcer. Just had another surgery, so it'd be good to harness the pain & grouch for good instead of evil. 
Posted by: Stu Oct 23 2010, 06:05 PM
They really should have someone in there at weekends...

|
Posted by: punkboi Oct 25 2010, 07:23 PM
The wheels are too big for skateboards, I'll give you that...
Posted by: Juramike Nov 2 2010, 12:21 PM
Three image composite view of MSL Curiosity and associated pieces and parts as of October 29, 2010 at 5:30 PM as seen from the viewing area.

|
MUCH higher-resolution image here: http://www.flickr.com/photos/31678681@N07/5138753408/
Posted by: Den Nov 7 2010, 11:40 PM
Oppy's troubles with Purgatory show that MER's specific pressure on the soil is a bit high.
I tried to find more info, but so far unsuccessfully.
What is MER's specific pressure? Will MSL's one be lower?
Posted by: djellison Nov 8 2010, 03:22 AM
sigh.... this has already been discussed. Pressure per unit area is not the be all and end all of mobility and traction.
Posted by: Den Nov 8 2010, 04:15 AM
Either I am blind, or it is discussed not in this thread.
As if I said it is... what's up with the hostility? I believe my question was quite innocuous.
Posted by: Floyd Nov 8 2010, 04:17 AM
Den, you might want to see this old thread and Doug's response there. I found it by searching on "traction".
Posted by: djellison Nov 8 2010, 04:53 AM
Innocuous, oft repeated and discussed, and an oversimplification of the Purgatory event.
Posted by: KrisK Jan 20 2011, 11:18 AM
Below, MSL's dynamic test model skycrane drop test. Great to see everything going as expected
http://www.youtube.com/watch?v=YasCQRAWRwU
Question: Animation shows that wheels will be extended prior to the drop. But during the test it appears that they are to be extended after. Why is it different?
Posted by: centsworth_II Jan 20 2011, 12:23 PM
Interesting. http://www.youtube.com/watch?v=_KLxmGLZQSY&feature=fvwk shows the wheels being extended even before the landing assembly is released from the back shell.
Posted by: djellison Jan 20 2011, 02:43 PM
The animation is several years old and the deployment sequence has been changed since it was made - that's all.
An updated animation under production.
Posted by: ElkGroveDan Jan 20 2011, 03:48 PM
... from Tuesday, hand-held with my phone so not the sharpest.

|

|
Posted by: eoincampbell Jan 20 2011, 04:06 PM
What's the giant spark-plug-looking thing?
Posted by: djellison Jan 20 2011, 04:17 PM
The blue and white thing on the right? Handling mechanism for the stacked spacecraft - that's the drive that turns the thing to whatever angle they need to work on it.
Posted by: Hungry4info Jan 20 2011, 05:23 PM
Very nice video showing the full motion drop test.
http://www.youtube.com/watch?feature=player_embedded&v=YasCQRAWRwU
Posted by: djellison Jan 20 2011, 05:25 PM
As linked to earlier today in this very thread, triggering the resulting discussion regarding the changed to the deployment of the mobility system.
Posted by: Hungry4info Jan 20 2011, 05:47 PM
Ah, I apologise.
Posted by: Mirek Jan 24 2011, 11:16 PM
Sample Analysis at Mars (SAM) by Paul Mahaffy from SETI Talks series http://www.youtube.com/watch?v=HHgBujkjFW8&feature=feedu
Posted by: RonJones Jan 27 2011, 11:23 PM
Does anyone know the status of the zoom Mastcam for MSL? I know the fixed focal length version was already delivered to JPL and probably has already been installed. Has anyone heard a cutoff date for the delivery of the zoom version in order for it to be considered by NASA/JPL to be used to replace the fixed version?
Posted by: KrisK Jan 28 2011, 12:44 AM
I'm also very curious about status of MastCams with zoom lens. Still there is info on:
http://www.msss.com/all_projects/msl-mastcam.php
Btw what is the mass of MSL's drop test model (recent skycrane drop test)? 1/3 of the mass of the flight rover?
Posted by: Stu Jan 29 2011, 04:46 PM
More money needed for MSL...
http://www.spacenews.com/civil/110128-mars-rover-need-cash.html
Posted by: MahFL Jan 31 2011, 12:40 PM
Yawn...that peice has enough, "proberblies, coulds, don't knows, virtualy no", to make it a waste of time reading.
Posted by: disownedsky Feb 1 2011, 02:29 PM
I thought it was a good article, and it leaves me a bit worried about the funding picture for MSL. If you're looking for certainty, you live in the wrong universe, although clearly NASA, (like most other large organizations) needs to get much smarter about risk management. Part of it is that it needs to be OK when embarking upon something really ambitious, to admit you don't know what you don't know and that mistakes will have been made in planning. If you know what you are doing, then you are doing what know, which doesn't promise to take us very far.
Posted by: SFJCody Feb 2 2011, 11:42 PM
I'm going to eat so many peanuts during EDL. As will many other UMSFers, I imagine.
Posted by: nprev Feb 3 2011, 01:24 AM
Oh, I'll dutifully eat my peanuts...but in all honesty I'm growing more & more comfortable with the descent methodology.
Frankly, it looks riskier than it really is, IMO. Essentially the only difference here between a conventional powered landing such as those performed by the Vikings & Phoenix is that the payload is attached by strong cables to the powered section rather than bolted on, and those cables extend prior to touchdown. The same touchdown sensing occurs as in previous successful landings, but instead of cutting the engines it cuts the cables & sends the engines away for a distance. The advantages are the ability to land a much heavier load than what is possible with airbags, plus spare the payload the shocks of bouncing (which are pretty rough, BTW...on the order of 40g's.)
So...Most of my sweat will be over once we hear that the descent engines have started...not all, of course, but most of it.
Posted by: Explorer1 Feb 3 2011, 01:51 AM
I had the same misgivings as well when I first heard the idea, it just sounds like so many moving parts that can fail. But if we just pretend those are elevator cables (which never snap like in fiction), and EDL will be as cool as a cucumber.
Posted by: SFJCody Feb 3 2011, 02:07 AM
I'm fine with the method of landing, it's the importance of the mission and how devastating a loss would be that worries me. If I'm not mistaken this is the most expensive lone Mars spacecraft ever.
Posted by: MahFL Feb 7 2011, 02:53 PM
I seem to recall the landing shock of the MER's was only 1 or 2 G's as per the engineering assesment. I believe everything was tested to 40 or so G's but the landing profile was not meant to impart that much force.
On second thoughts I might be getting mixed up with Phoenix Lander, which touched drown pretty softly....
Posted by: centsworth_II Feb 7 2011, 03:24 PM
From: http://www.planetary.org/news/2004/0125_Opportunity_Has_Landed__and_Sent.html
"By 9:05 p.m., Opportunity was bouncing on the ground in Meridiani Planum, landing with a relatively light impact force of between 2 and 3 Gs."
Posted by: djellison Feb 7 2011, 03:54 PM
Those low G forces were unexpectedly at the soft end of a bell curve that extended to 40G. You have to design with the 40G in mind, because next time you might not be so lucky on the combined performance of chute / airbags / radar / surface / wind etc.
The MSL landing technique reduces the size of that bell-curve drastically.
Posted by: MahFL Feb 8 2011, 11:21 AM
The MSL landing technique reduces the size of that bell-curve drastically.
I know you have to design with 40 G in mind, cause if it went to 4 G's and broke, you'd be kicking yourself in the backside for ever.
Also NASA HQ would not accept 4 G........
Posted by: djellison Feb 8 2011, 02:59 PM
So your point of post 178 was.....?
Posted by: centsworth_II Feb 8 2011, 05:48 PM
If MahFL had not responded to the statement, "...the shocks of bouncing (which are pretty rough, BTW...on the order of 40g's)" , I for one would have been left with the mistaken impression that those were the actual forces experienced by the MERs.
Posted by: djellison Feb 8 2011, 06:26 PM
I didn't get that impression at all. Meh.
Posted by: MahFL Feb 10 2011, 12:55 AM
I was just pointing out that the forces on bouncing were not 40 G but a relatively benign 3 or 4 G's. That was probably due to the excellent performance and timing of the of the retro rockets. So in future it might be argued that airbags work well, within the limits of thier design. Of course there is always going to be a day when your not so lucky.
Posted by: dshaffer Feb 10 2011, 12:50 PM
Does anyone have an answer to this?
Posted by: ZLD Feb 10 2011, 03:12 PM
You could try contacting someone from the http://www.msss.com/science/msl-mmm-science-team.php. It may be something they wouldn't be willing to diclose at this time though.
Posted by: Mirek Feb 10 2011, 07:15 PM
Looks like they have attached radiator for the RTG earlier today.
Posted by: tharrison Feb 10 2011, 07:16 PM
I'm on the Mastcam science ops team at MSSS. All I can say is what it says on the websitethe zoom Mastcams are currently under construction, and the FFL Mastcams have already been installed on the rover at JPL.
Posted by: charborob Feb 10 2011, 09:28 PM
The http://msl-scicorner.jpl.nasa.gov/Instruments/Mastcam/ mentions this:
"In early 2010, NASA reconsidered the VFL [variable-focal length = zoom telephoto] cameras and work resumed on assembling these cameras, which will replace the FFL cameras described here if the work is completed in time and the instruments meet their requirements."
I don't know when the above sentence was written. My guess is that they have installed the fixed focal length cameras in case the VFL cameras are not ready in time or do not meet the "requirements". How much time would be needed to remove the FFLs and replace them with the VFLs? And what impact would that have on the rest of the assembly?
Posted by: elakdawalla Feb 10 2011, 09:44 PM
If you check in on the Ustream webcast of MSL periodically you'll see that they are continuously assembling and disassembling the rover. Right now it's getting close to an assembled state because they're about to take it in for "shake and bake" testing, but after that I'm sure it'll get disassembled again. So even if the current incarnation of the MastCam is currently integrated into the rover, that doesn't mean it won't come off the rover again in the future; there are probably many opportunities to swap things out. Though obviously the sooner anything new can get integrated, the better.
Posted by: djellison Feb 11 2011, 02:33 AM
That's the mechanism used to put the RTG onto the rover - There is an engineering model RTG that I presume they're installing right now, to add some fidelity to the thermal-vac testing that's coming up soon. The radiators themselves have been there for a long time already.
Posted by: tharrison Feb 11 2011, 03:45 PM
"In early 2010, NASA reconsidered the VFL [variable-focal length = zoom telephoto] cameras and work resumed on assembling these cameras, which will replace the FFL cameras described here if the work is completed in time and the instruments meet their requirements."
I don't know when the above sentence was written. My guess is that they have installed the fixed focal length cameras in case the VFL cameras are not ready in time or do not meet the "requirements". How much time would be needed to remove the FFLs and replace them with the VFLs? And what impact would that have on the rest of the assembly?
By the time NASA decided to reconsider the VFL cameras, the FFL Mastcams were already complete (and I think they had already been delivered to JPL at that point), so they've been installed on the rover since last summer. It shouldn't take too much time to physically swap out the cameras; the most time-consuming part would be any testing that they'd want to do once the cameras are installed on the rover.
Who knows, if the VFL cameras aren't completed in time for MSL, maybe NASA consider sticking them on the 2018 rover since they've already paid for them...
Yeah, they installed the model RTG yesterday in preparation for launch vibration testing. The real RTG won't be installed until the rover gets to Kennedy.
Posted by: PaulM Feb 11 2011, 11:32 PM
I asked Rob Manning: Why were there blue flashing lights Yesterday?
Rob replied: the blue light indicates that power is flowing, usually to the rover
the light can be hooked up to other systems in the room, too, like the descent or cruise stages
http://www.ustream.tv/nasajpl
EDIT: Thanks for the link below to the FAQ
Posted by: elakdawalla Feb 12 2011, 05:42 AM
That's like the second most frequently asked question on the MSL UStream chat (after "what is this?"). http://www.jpl.nasa.gov/msl/curiosity/index.cfm?page=faq.
Posted by: Oersted Feb 14 2011, 01:12 AM
tharrison, I have a question. How are the zoom cameras designed "safety-wise", in case of failure of the additional zoom mechanism? Would a malfunction at that failure point lead the mechanism to revert to a usable fixed-focal-length mode? Or would it just be black curtain time? I guess what I'm asking could also be put like this: if the current doesn't flow to the mechanism anymore, will it mechanically revert to a usable state? As in, electricity flowing enables zooming, but if no electricity flows, a spring will push the lens back to a neutral usable fixed-length zoom.
Posted by: djellison Feb 14 2011, 05:44 AM
If it fails - we end up with what's onboard the spacecraft now
Posted by: Oersted Feb 14 2011, 09:46 PM
A robust failure mode for a zoom-lens equipped camera will give it a better chance of making it onto Curiosity. If any conceivable failure will merely make the camera revert to a fixed-lens mode with no further capability degradation it would give the camera a much better chance of making it onboard, I should think. I'm sure James Cameron would agree.
Posted by: djellison Feb 14 2011, 10:02 PM
Actually - any changes right now would give it zero chance of making it onto Curiosity.
Posted by: Oersted Feb 15 2011, 05:14 PM
Dear me, yes. I am asking about what is already in the camera, not suggesting changes!
Posted by: Bobby Feb 18 2011, 04:57 AM
Does anyone here know when they Plan to Launch MSL and when it's suppose to land???
Admin: Bobby a PM has been sent to you on this matter.
Posted by: Oersted Feb 19 2011, 01:03 AM
I thought it was not fair that only Bobby should be privy to the info via a PM, so I searched this thing called the interweb, and found the following:
" It is scheduled to be launched in November 2011 and land on Mars in August 2012"
From:
http://en.wikipedia.org/wiki/Mars_Science_Laboratory
Posted by: djellison Feb 19 2011, 01:04 AM
That's not why he was sent a PM by an Admin.
Posted by: tharrison Mar 10 2011, 09:45 PM
Sorry for the delay in getting back to youunfortunately I don't think I am allowed to discuss any of the specifics of the zoom lenses since that information has not been publicly released.
As an unofficial answer, I would assume such a safeguard is in place or NASA would consider the cameras too risky to fly.
Posted by: Oersted Mar 12 2011, 01:13 AM
Thanks for your reply, much appreciated. Hey, then I'll assume so as well!
Posted by: Astro0 Mar 18 2011, 05:56 AM
Weather monitoring equipment installed on MSL - story http://www.jpl.nasa.gov/news/news.cfm?release=2011-085.
The photo accompanying the article for some reason reminds me of the marble game called 'Kerplunk'.
See my comparison photo below...

|
...BTW, the fact that Miranda Kerr is also in this photo is purely accidental
Posted by: nprev Mar 18 2011, 06:16 PM
I don't know if anyone here has ever noticed this before, but MSL is, uh, BIG.
http://www.jpl.nasa.gov/images/msl/20110318/pia13805-full.jpg
Posted by: Ron Hobbs Mar 19 2011, 06:33 PM
I have noticed that! Last year the Museum of Flight had a full sized model on loan from JPL. Here is yours truly interpreting it to the local media.

|
Posted by: BrianL Mar 24 2011, 04:51 PM
Emily reports there will be no zoom.
http://www.planetary.org/blog/article/00002972/
Posted by: James Sorenson Mar 25 2011, 01:37 AM
That sure is sad . I hope an official press release on the matter can be issued soon. MSSS still says the zoom versions are being fabricated....
Posted by: nprev Mar 25 2011, 01:48 AM
I doubt that any release will be more informative & insightful than Emily's article.
As always, it was a race to balance cost, schedule, and performance, and cost & schedule are very hard (as in inflexible), very difficult-to-meet constraints to overcome in order to meet planetary launch opportunities. Getting this done was always a bit of a reach, frankly.
MAJOR kudos to MSSS for their heroic efforts; it wasn't their fault, and the knowledge gained is gained forever.
Posted by: eoincampbell Mar 25 2011, 03:52 AM
Over in the corner, are these flight instruments to date? ...
http://msl-scicorner.jpl.nasa.gov/Instruments/
Posted by: KrisK Mar 25 2011, 11:12 PM
Offical info on zoom Mastcams from MSSS including sample photo:
http://www.msss.com/news/index.php?id=22
Posted by: Explorer1 Mar 26 2011, 02:54 AM
The end implies that they may be useful on some future mission, so some good will come of this, like with Phoenix.
Posted by: nprev Mar 26 2011, 03:25 AM
It's new knowledge, so it's inevitably a net gain. As a species, we have never lost from increaing our knowledge in any respect.
The zoom-cam might never fly. However, what MSSS learned from building it will certainly not be wasted. After all, we have moved a bit beyond the discovery that knocking flakes off of flint nodules makes effective knives...
Posted by: James Sorenson Mar 26 2011, 06:26 AM
I just noticed on that picture from the release, the fixed camera's sure do give Curiosity quite a stink-eye
Posted by: ElkGroveDan Mar 26 2011, 02:06 PM
And there it is. It all boils down to fabrication tolerances. Inside an optical mechanical device you're probably looking at variations of 1/100th mm or less. There's probably an entire story to be told on how that came about.
Posted by: algorimancer Mar 28 2011, 08:01 PM
While disappointed at the loss of the zoom capability, I was on the verge of assuming that this would simplify things for photogrammetry software (AlgorimancerPG), as I wasn't yet clear on how to handle a zoomable camera model, then I realized that the current stereo capability pairs a wide-field camera with a narrow-field camera. This design also introduces challenges, but not that difficult to cope with in the software. I should have time to implement the Curiosity camera model next Spring, in plenty of time for the mission. Sadly, I have the sense that the narrow/wide pairing will be of more use in range-finding than creating the color stereo panoramas we've come to enjoy with Spirit and Opportunity (and Pathfinder).
Posted by: centsworth_II Apr 4 2011, 05:57 PM
Press got a close look at MSL today. Emily L. is down there, but how to know who is who?
edit: Here's my guess. (Also edited my renaming of Emily. We need an :embarrassed: emoticon!)

|
Here's a http://plixi.com/p/89535216

|
Posted by: centsworth_II Apr 4 2011, 07:10 PM
http://twitter.com/elakdawalla
"I'm glad I wore 4-inch heels today because I needed them to see onto the top of @MarsCuriosity's deck"
Looks like I guessed wrong. 
edit: Or not! See Emily's post below.

|
Posted by: elakdawalla Apr 4 2011, 07:46 PM
That is indeed me! And it's Bill Nye with the mike. My heels are jammed into those shoe covers--worked pretty well. Thanks for the screen cap!
Posted by: elakdawalla Apr 5 2011, 04:13 AM
Here's a little photo album of rover pics; more explanation to come.
http://www.flickr.com/photos/53402955@N08/sets/72157626307132273/
Posted by: ElkGroveDan Apr 5 2011, 04:29 AM
|
|
You space media types all look alike to me.
Posted by: SFJCody Apr 5 2011, 06:44 AM
Still amazing to think that before the year is out this enormous machine will be departing for Mars.
Posted by: jamescanvin Apr 5 2011, 07:36 AM
Great pics Emily. I couldn't help noticing that you took them with a 3D camera. You know what we all really want to see now don't you.
Posted by: eoincampbell Apr 5 2011, 03:47 PM
Will a housing or baffle surround the nav and pan cameras on the mast ?
P.S. Fantastic pics, thanks Emily!
Posted by: djellison Apr 5 2011, 04:26 PM
What do you mean Eoin? That mast assembly is basically finished. There no additional hardware or 'baffle' to be added.
Posted by: Phil Stooke Apr 5 2011, 04:41 PM
Yes, frankly I'm baffled by the suggestion!
Phil
Posted by: eoincampbell Apr 5 2011, 05:06 PM
Was thinking a dust cover/hood like ChemCam's ... so when the camera units are shipped from MSSS they're essentially ready for martian exposure?
Oh and were the weather sensors covered for this press meeting? (if so, until launch?)
Posted by: djellison Apr 5 2011, 06:35 PM
Umm? You mean the white box it lives in?
Why would the cameras need that?
And yes - the Met instruments were on the mast - one under a mylar bag, one under a red metal cover.
Posted by: djellison Apr 5 2011, 07:42 PM
Meanwhile
http://www.youtube.com/watch?v=BudlaGh1A0o
New project animation. There's more to come, but that's what was ready for yesterdays press day
Posted by: Toma B Apr 5 2011, 08:07 PM
OMG!!!! This new animation is really beautifull!!!
I love it!!!
Can't wait to see what will happen in 2012.
Posted by: centsworth_II Apr 5 2011, 08:10 PM
New project animation....

|
Looking at the animation of fine particles effortlessly flowing into place for analysis, I flashed back to the sample delivery problems experienced by Phoenix. If for whatever reason the sieves described below become clogged, I hope there are workarounds.
"Soil and rock samples that have passed through the 150-micron sieve of CHIMRA can be deposited on the tray, observed by the APXS and MAHLI, and subsequently removed from the tray by the DRT brushes. After delivering sieved material (soil or rock) to SAM and/or CheMin, the remainder of the sieved material can be analyzed in this way. There may be other options for use of the tray (such as delivery of scooped soil passing the 1 mm sieve to the tray), but none can be guaranteed at this time."
http://msl-scicorner.jpl.nasa.gov/samplingsystem/
Posted by: ElkGroveDan Apr 5 2011, 08:15 PM
Haven't we already been to Burns Cliff?
Awesome job Doug.
Posted by: elakdawalla Apr 5 2011, 08:20 PM
Believe me, they took the lessons from Phoenix to heart. That was one of the big benefits of the launch delay; I think there was a lot of redesign to SAM and CHIMRA as a result, and they've tested it with soils with properties similar to what Phoenix encountered.
Posted by: djellison Apr 5 2011, 09:42 PM
"Can we have it exploring an outcrop?"
"Like, say, Burns cliff or Payson?"
"Yeah - just like that"
"You got it"
The artists used slabs of burns cliff as paint-brushes to create that outcrop - it worked really well. People have gone "That's familiar" but didn't know why - I knew this crowd would get it. Wonder if anyone will notice the area with a data drop out in one of the color channels of the image used.
Posted by: elakdawalla Apr 5 2011, 09:55 PM
Recently I asked Matt Golombek to describe to me what MSL's landing site is going to look like from the ground. He said that three of the four sites will be mostly dust-free and rock-free, like Meridiani; that they will be "slopier" at all scales than any previous landing site, so, he said, imagine the Columbia Hills; and that since they're looking for layered rocks, to imagine the Columbia Hills made of Burns Cliff like material. I can't wait.
Posted by: KrisK Apr 5 2011, 10:00 PM
The new animation is wonderful Now we can see even more details of MSL EDL. Btw anyone knows what is that little thing separating prior to re-entry at about 1:09 and also even more little stuff at 1:48? I was also wondering if there will be EDL animation showing events in real time similar to this one made for Phoneix landing:
http://www.youtube.com/watch?v=IUEF1azd8T8
Posted by: hendric Apr 5 2011, 10:01 PM
I hope Scooterlord lifts his head up long enough to request any necessary Curiosity portraits for his next project.
Posted by: nprev Apr 5 2011, 10:07 PM
That animation is sweet. Nice work!!!
Posted by: Stu Apr 5 2011, 10:17 PM
That new animation is simply stunning. That felt like I was watching it live from the surface, it really did. The deployment and landing still makes me want to rush to the loo, it looks so insanely terrifying, but this is the first time I've watched that and not shaken my head in disbelief.
Fantastic job.
Posted by: sgendreau Apr 5 2011, 10:36 PM
edit -- ah. Missed the Burns Cliff post. Nice work by the artists, Doug!
Posted by: B Bernatchez Apr 5 2011, 11:07 PM
Now we can see even more details of MSL EDL. Btw anyone knows what is that little thing separating prior to re-entry at about 1:09 and also even more little stuff at 1:48? I was also wondering if there will be EDL animation showing events in real time similar to this one made for Phoneix landing:http://www.youtube.com/watch?v=IUEF1azd8T8
Those are balance weights. Some are jettisoned just before entry to make the aeroshell unbalanced in order to generate lift and make it steerable. This allows for a more precise landing, and was used on the Apollo Command Module. The rest of the weights are jettisoned just before parachute deploy so that the system is again balanced.
Regards,
Bob B
Posted by: djellison Apr 5 2011, 11:12 PM
MSL spins during cruise- so the mass has to be ballanced.
However, for its guided entry, the centre of mass and centre of pressure need to be offset. Hence, just before hitting the atmosphere, two slabs of ballast are thrown overboard (CBM - Cruise balance mass - I'm guessing here, 2 x 75kg...HiRISE, crater? Hopefully!) )
But - before you deploy the parachute, you want to straighten up and fly right ( SUFR...no, really, they made it an acronym ) - and 6 x 25kg ballasts are thrown overboard (the bang..bang..bang..bang..bang..bang sfx)
Lots of info here : http://trs-new.jpl.nasa.gov/dspace/handle/2014/41708
If there were an excess of time and money ( something MSL doesn't have, sadly ) one could imagine a situation where those CBM's were infact DS2 like probes of some sort. Not this time, sadly.
Posted by: nprev Apr 5 2011, 11:58 PM
I think I know the answer to this question before asking, but gonna ask it anyhow because it's cool: Is that attitude maneuver by the upper booster stage right after the injection burn intended to give MSL the proper angle of attack for Mars atmospheric entry? (I'm just amazed that they do it 8.5 months in advance!)
Posted by: SFJCody Apr 6 2011, 12:07 AM
Nice.
Love the new video. 2012 can't come soon enough!
Posted by: eoincampbell Apr 6 2011, 01:40 AM
I see from http://msl-scicorner.jpl.nasa.gov/Instruments/ChemCam/ why ChemCam needs the "helmet"...
Posted by: BrianL Apr 6 2011, 05:00 AM
Really? Every time I watch what is planned for MSL/Killed the Cat I think,you have to be kidding. They intend this whole sequence to work without ever once trying it live from start to finish (which of course I guess they can't do given that whole pesky Earth gravity/thick atmosphere thing)? Fine, I admit it. I'm not just a glass half empty kind of guy, I figure all I'm going to get is a splash in the bottom and it will be putrid, to boot. Well, I hope they prove me wrong. I hope someone resurrects this and says, Hey Mr Pessimist, remember this post of yours from April 5, 2011? But my gut feeling is we will all be cheering on Oppy as the only Mars rover in operation for a long time to come. Oh wait, that would make me an optimist in a sense, wouldn't it? Right, forget that last part, I don't know what I was thinking.
Posted by: stevesliva Apr 6 2011, 05:30 AM
Ask John Young and Robert Crippen about faith in extremely complex things going right the first time.
Posted by: djellison Apr 6 2011, 05:34 AM
Just like Pathfinder. Just like Spirit. Just like Opportunity. Just like Viking.
I heard the MSL landing system described differently yesterday - and very well.
It's like MER...but instead of RAD solid rocket motors, it's liquid motors that can be throttled. It's a far more sensible way of putting something on the surface.
As you're convinced it's going to fail - I'd be interested to know what you think they need to do to succeed in landing an 850kg+ rover on the surface. Moreover, without falling foul of the appeal-to-authority logical fallacy - what it is that makes you think you (number of Mars landings engineered...0) know better than them ( number of Mars landings engineers - 3. PHX and MPL were LoMart, not JPL )
If you can't point at something and say 'THAT bit there, will fail'- and explain why - then you're just arm waving.
Further - yes - it might fail. That doesn't mean your pessimism without justification is in any way 'right'. If you think there's a reason why it will fail, and you understand that reason - then bring it forward.
Posted by: mchan Apr 6 2011, 05:55 AM
Since the cruise stage has a propulsion system for trajectory correction, it must have some mechanism to adjust attitude for the burns. The cruise stage is spin-stabilized, and I don't recall or see how control gyros are used. So I'm guessing thrusters for attitude control. And if it has thrusters, then there is no need to orient for atmospheric entry 8.5 months early.
My guess is the orientation is to face the solar array on the back of the stage perpendicular to the Sun to maximize solar cell efficiency. Another consideration is to maximize antenna for Earth communications. The antennas are probably low-gain, omnidirectional, but even so, some directions work better than others.
Posted by: mchan Apr 6 2011, 06:03 AM
That's...low.
Besides, PHX worked. And I think MPL was due to FBC, it got F and C, but unfortunately, not B.
Posted by: djellison Apr 6 2011, 06:27 AM
It's also accurate. The team responsible for the design, implimentation and testing of the MSL EDL system have a 3/3 record over the past 14 years.
Posted by: djellison Apr 6 2011, 06:33 AM
Actually - the way TCM's are done with an MPF/MER/MSL spinner cruise stage is to not turn. You fire all four thrusters in one cluster in a pulse at some point during the rotation to adjust in that plane ( many tens of times. it's shown once in the animation) or, fire the after or fwd facing of each cluster constantly to adjust in the other 'axis'.
I wondered how on earth they did TCM's on spinning spacecraft until I met a guy from the Nav team who explained the whole process. It's very clever ( but very hard to explain with words )
At the end of cruise - they chuck the cruise stage - then use the thrusters on the descent stage ( that stick out the back of the backshell ) to despin from the 2rpm cruise spin rate and turn to entry attitude.
Posted by: SFJCody Apr 6 2011, 06:49 AM
I may have asked this before (and if so I apologize) but does anyone know at what point (in terms of payload properties like mass & volume etc) the Pathfinder/MER approach stops being workable and an MSL skycrane becomes more suitable? Similarly, how much larger/more massive could MSL be while still using the EDL method it uses now?
Posted by: AndyG Apr 6 2011, 09:57 AM
I suppose the glib answer is somewhere between the mass of MER and MSL.
But - more seriously - the overall EDL techniques are not that dissimilar: aerobraking + parachute + rockets to a stop at some altitude above the surface. It's at that point MER relied on airbags (heavy, require a righting-platform for the rover, bounce the contents, can rip) and MSL will be lowered (puts rover down "good to go"). The more I look at the proposal for MSL, the more and more I like it. (Though I shall no doubt still have my heart in my mouth for the minutes of terror).
A reasonable rule of thumb for Martian heatshields is 100-130kg of carried mass per square metre. Parachutes can certainly be bigger than the MSLs - check out MegaFly from ParaFlite for the sort of things that could be possible. Braking rockets are scalable. If there's a real restriction in the mix it must be with launch vehicle diameters for a heatshield.
Andy
Posted by: MahFL Apr 6 2011, 10:41 AM
Exactly how "good to go" will MSL be ? I would imagine there would still be a bunch of flight locks to release before driving.
Posted by: djellison Apr 6 2011, 02:03 PM
Covers over R and F Hazcam's will deploy before the end of Sol 0, but that's about it ( not going to command a mast deployment until the state of the vehicle is known )
Sol 1 - more rover checkout
Sol 2 - Mast deploy, first panorama
Sol 3 - Targeted remote science, first HGA use.
Should be good to drive by Sol 4. All that will be required for that first drive is to steer front and rear wheels straight - they are turned 'in' slightly to be stowed under the descent stage.
Posted by: elakdawalla Apr 6 2011, 02:31 PM
We're all going to have to be very patient. MSL may be designed to rove long distances but the mission will likely get off to a rather slow start, because one of the first things they're going to do, once they've completed their checkouts, is to scoop up a soil sample and run it through CheMin and SAM. That first sample acquisition is going to take a reeeally long time because they will have to have a human in the loop to make Go/No Go decisions at many stages with their first use of that complicated sample acquisition and handling equipment on the end of the arm. And having a human involved in decisionmaking with a robot on Mars is time-consuming. I talked with Grotzinger about this recently and he said they're still figuring out how many small steps they plan to divide this process into, how many places a human will have to be involved. This isn't just a practice run -- getting that ubiquitous Mars dust into CheMin and SAM will probably produce the most important early science result from the mission, because we've never had those instruments on Mars soil before and Mars soil affects the appearance of nearly everything we see from orbit, and even everything the MERs saw remotely.
Posted by: hendric Apr 6 2011, 03:15 PM
Sounds like a great opportunity for a Discovery program, or perhaps a Technology Demonstrator program. You could have two tracks, one with a 75kg mass target and one with a 25kg mass. If the spec requirements were released before hand, universities could even compete. There probably would be pretty severe requirements on volume and center of mass, but nothing that couldn't be worked around. The hardest part would be planetary protection for a low-cost design. To reduce danger to the main mission, I wouldn't even provide power across the interface; the batteries would turn on when the mass is cut from the stage.
CubeLanders for Mars is ™ Richard Hendricks.
Posted by: AndyG Apr 6 2011, 03:21 PM
Given that we have to wait until August next year, I'm practising my patience.
...and of course, while MSL sits and preps herself, we'll no doubt have plenty of fun with parachute and lander-spotting from orbit. Seeing the EDL imaged from orbit would be quite sweet, too: "it's traditional"!
Andy
Posted by: ZLD Apr 6 2011, 03:27 PM
Would it be at all feasible for a future mission to include a few atmospheric/climatological instruments on top of the skycrane and a balloon to carry it aloft? I'm picturing the skycrane dropping a rover and then flying as high as possible, exhausting the propellant and then inflating a balloon and communicating to the rover or an orbiter via low power UHF.
Posted by: djellison Apr 6 2011, 03:40 PM
Technically, it might be possible.
What are you going to take off the rover to pay for this, in terms of mass, time, money, power etc etc.
That's the trade in question.
Posted by: nprev Apr 6 2011, 04:06 PM
All I want for Christmas is  on the ground in mid-2012.
on the ground in mid-2012.
That's it.
Posted by: ZLD Apr 6 2011, 04:27 PM
I was thinking more along the lines of that being a new millenium mission to curb costs. For power, the skycane already includes a battery; a larger battery would be preferrable though. As for mass, it would entirely depend on the selected instruments, size of battery, computer, and ballon but I think a few more kilograms, if balanced, would not compromise the vehicle. That leaves the time factor, which I am unsure how long it would take to develop and test everything in such a project but certainly a lengthy duration would be likely. Just seemed like a decent potential MoO along side a rover.
Posted by: djellison Apr 6 2011, 05:18 PM
It doesn't matter where the money actually comes from -it still costs money. The NM program has more cancelled projects than completed ones. Balloons are not a great platform at Mars due to the very low atmospheric density.
Plus - deploying from the descent stage after seperation...you're eating into the fuel margin, adding potential re-contact problems and adding command and control capabilities to the descent stage that it doesn't have.
Moreover - with instruments like MCS collecting so much data, I'm not sure there's significant scientific benefit from a single atmospheric sounding over a site that's just had an atmospheric profile taken during EDL.
I think you're under the impression that adding something like this to the descent stage is comparatively trivial. It isn't.
Posted by: paxdan Apr 6 2011, 05:53 PM
Excellent set of photos of MSL in this BoingBoing gallery: http://www.boingboing.net/2011/04/06/nasa-mars-science-la.html
Posted by: B Bernatchez Apr 6 2011, 10:17 PM
Although I cannot find the link now, I have read that the MER's were at the upper end of what the airbag system was able to land safely.
Posted by: eoincampbell Apr 8 2011, 06:08 AM
Were Phoenix cameras enclosed?
http://www.unmannedspaceflight.com/index.php?showtopic=5519
thanks for the infos...
Posted by: ZLD Apr 8 2011, 06:47 AM
Yes, but they were housed together in a single enclosure where as the mastcams on MSL are housed in separate enclosures. Adding a second enclosure around the mastcams would be unnecessary and only serve to add more weight.
Posted by: Astro0 Apr 8 2011, 07:13 AM
on the ground in mid-2012.Hey nprev, I think you mean these wheels don't you?!
|
|
Posted by: djellison Apr 8 2011, 07:17 AM
Were the 20 cameras flown on MER
(answer, no)
Are the 12 Engineering cameras on MSL
(answer, no)
I'll ask again - what sort of enclosure and for what purpose.
Posted by: Oersted Apr 13 2011, 10:41 PM
Surprised they are going to do this in a place that would be quite heavily contaminated by the descent rockets. Then again, if they get a signature full of known contaminants then they might be able to identify later signatures more accurately. And of course I understand the idea of a contingency sample if things go down the drain shortly into the mission... (better flash that RAM...)
Posted by: Oersted Apr 13 2011, 10:43 PM
However, for its guided entry, the centre of mass and centre of pressure need to be offset. Hence, just before hitting the atmosphere, two slabs of ballast are thrown overboard (CBM - Cruise balance mass - I'm guessing here, 2 x 75kg...HiRISE, crater? Hopefully!) )
But - before you deploy the parachute, you want to straighten up and fly right ( SUFR...no, really, they made it an acronym ) - and 6 x 25kg ballasts are thrown overboard (the bang..bang..bang..bang..bang..bang sfx)
Lots of info here : http://trs-new.jpl.nasa.gov/dspace/handle/2014/41708
If there were an excess of time and money ( something MSL doesn't have, sadly ) one could imagine a situation where those CBM's were infact DS2 like probes of some sort. Not this time, sadly.
Flabbergasted to hear that there is so much mass just in there as ... mass. Obviously there is not other way to do it, or they wouldn't have, but still surprises me. And I guess the mass didn't serve any other purpose? (batteries, or some such...)
Posted by: djellison Apr 13 2011, 11:57 PM
It's just slugs of metal so that their #1 requirement ( be a mass of X kg ) can be set rapidly, easily, and if necessary, changed with ease before launch.
Posted by: centsworth_II Apr 14 2011, 12:25 AM
Posted by: elakdawalla Apr 14 2011, 01:05 AM
The issue of contamination didn't come up in conversation. I assume, but haven't been told explicitly, that they would drive a bit just to make sure everything works before doing a sample analysis. How much "a bit" is I don't know, but I would assume that if contamination were an issue, they'd drive far enough to get away from it. I'm sure they'll select their sample site carefully, which would usually involve a bit of a drive anyway.
Posted by: nprev Apr 14 2011, 01:46 AM
Someone please correct me if I'm wrong, but both Phoenix & MSL used/will use ultrapure NH4 as their thruster fuel, yes? Therefore, we're certainly not talking about any sort of potential erroneous detection of organics (to say nothing of perchlorates.)
Posted by: mchan Apr 14 2011, 02:34 AM
Well, I doubt they are using ultrapure ammonium ions. Hydrazine has an extra N.
Posted by: nprev Apr 14 2011, 02:37 AM
Damn! I always do that!!!
Posted by: ElkGroveDan Apr 14 2011, 03:06 AM
You've already lost an N, don't you dare lose an H now Mr. Previsich, or you'll be cleaning toilets with it!
Posted by: nprev Apr 14 2011, 03:29 AM
Argh...I should also lose two Hs & add a C...
Posted by: peter59 May 14 2011, 07:56 PM
Gentlemen, time to start the countdown. This is only a few months to launch. Now each day will bring new information, new pictures. Final stage of preparation slowly approaching. It's not a dream, this is reality.
Biggest-Ever Heat Shield Prepared for Mars Spacecraft
http://mars.jpl.nasa.gov/msl/multimedia/images/?ImageID=3501
Preparing Mars Science Laboratory Heat Shield
http://mars.jpl.nasa.gov/msl/multimedia/images/?ImageID=3500
Working on Curiosity in JPL Spacecraft Assembly Facility
http://mars.jpl.nasa.gov/msl/multimedia/images/?ImageID=3499
We have yet to choose the perfect target, crater Gale or Holden for example.
Posted by: pospa May 15 2011, 05:09 AM
During previous week(s) Curiosity was upside down again with all wheels, belly panel and turret off.
Acording to interview with Pete Theisinger (MSL PM) http://www.space.com/11618-mars-rover-curiosity-theisinger-qanda.html, some rework had to be done on drill, avionics and cabling after all complex tests (bake & shake, etc.) that rover went through in previous months.
Would anybody know what wrong was revealed by PADS drill?
Thx
Posted by: centsworth_II May 15 2011, 11:51 AM
Would anybody know what wrong was revealed by PADS drill?
Posted by: Oersted May 16 2011, 10:50 PM
Thanks for the Theisinger link pospa, great read.
When she's off Planet Earth I'll ask the team some more questions about the EDL system and what they expect of it, via this forum. For now I will leave them alone, I think they must be busy!
Posted by: Stu May 17 2011, 11:24 PM
Wow... Curiosity is looking really cool now, isn't she..?

|
Posted by: eoincampbell May 18 2011, 03:28 AM
I wonder what she's listening to?(through that big speaker stack!) Probably that new AC/DC album
Posted by: punkboi May 18 2011, 06:05 AM
Too bad it wasn't configured like that during the JPL Open House last weekend
Posted by: MahFL May 18 2011, 01:33 PM
The arm is a lot longer than I thought it was.
Posted by: djellison May 18 2011, 01:42 PM
You're lucky - 49hr before Open House the rover was upside down, had it's wheels off and had the belly-pan off. It didn't look like much of anything.
Posted by: Oersted May 20 2011, 10:35 PM
Hehe, it looks as if she is holding one of the guys by a leash...
- And that, I guess, is probably how many of them feel: their lives being run exclusively by that behemoth of a rover... - And they're loving it!
Posted by: Nomadd22 May 24 2011, 02:59 PM
Has there been any information on the degree of backshell damage?
Posted by: djellison May 24 2011, 04:00 PM
As yet, no.
For those who've not seen it : http://www.aviationweek.com/aw/generic/story.jsp?id=news/awx/2011/05/24/awx_05_24_2011_p0-326920.xml&headline=Mars+Science+Lab+Hardware+Damaged&channel=space
Posted by: ZLD May 24 2011, 05:56 PM
If it doesn't launch in 2011, is it likely testing will continue periodically or will it basically just sit in storage for a few years, and how would that effect power output from the RTG?
Posted by: ugordan May 24 2011, 05:57 PM
Phew. Apparently a non-issue. http://twitter.com/#!/marsroverdriver/status/73077289667149824:
Posted by: B Bernatchez May 24 2011, 08:12 PM
The radioactive decay of the RTG source is continuous, and has been ongoing since the unit was "built". I believe that this part was ready for the 2009 launch window, so it has been decaying for 2-4 years, I suppose.
Posted by: elakdawalla May 24 2011, 08:20 PM
I http://www.planetary.org/blog/article/00001761/ around the time of the delay in 2009 and here's what I was told then. I'm sure the answer will be similar now, because although decay is continuing, the rate of decay is slowing with time.
Posted by: Nomadd22 May 25 2011, 11:22 AM
I don't think half life was ever an issue. Thermocouple deterioration is a bigger factor, and those are suppose to be a lot better in the newer RTGs. That thing will probably still be at 70% power in 20 years.
Posted by: pospa May 25 2011, 12:27 PM
MSL Back shell "seems OK after mishap, R. Cook said, ..., no visible damage, although it is not out of the question that NASA may perform x-rays and other non-destructive evaluation."
http://www.aviationweek.com/aw/generic/story_channel.jsp?channel=space&id=news/awx/2011/05/24/awx_05_24_2011_p0-327260.xml&headline=Mars
Powered by Invision Power Board (http://www.invisionboard.com)
© Invision Power Services (http://www.invisionpower.com)