Printable Version of Topic
Click here to view this topic in its original format
Unmanned Spaceflight.com _ Perseverance- Mars 2020 Rover _ Mars2020 landing cameras
Posted by: Stratespace Jun 15 2016, 10:19 PM
I am so enthusiastic about the (proposed) Mars2020 camera suite during EDL, as presented today at IPPW:
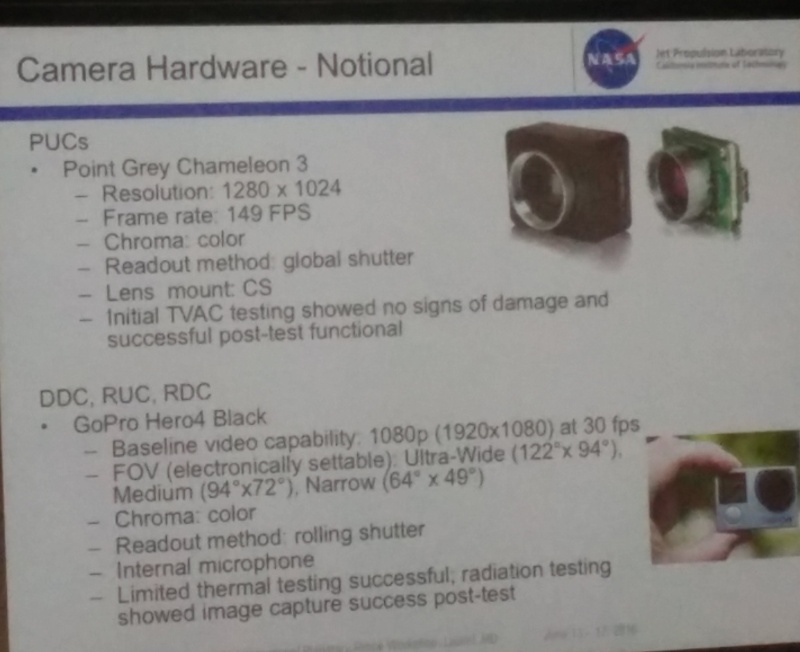
- 3 PointGrey Chameleon 3 that will be on the skycrane and look up, to monitor parachute deployment at 150 fps.
- 1 GoPro Hero 4 on the skycrane, looking down to monitor the rover descent and landing
- 1 GoPro Hero 4 on the rover, looking up to monitor the skycrane and fly-away
- 1 GoPro Hero 4 on the rover, looking down like MARDI did on Curiosity
- MARDI, of course.
All GoPro have microphone that will be activated, and have been tested successfully in the proper thermal and radiative environment. We should have some awsome footage if it actually flies.
Posted by: James Sorenson Jun 16 2016, 02:28 AM
I have three Point Grey Chameleon3 cameras myself for my personal rover. Wonderful cameras...but you can't be serious for...2020? I doubt these are even space qualified or even hold up to the temperature extremes. Unless they will be in custom cases that are heated.
Edit: Oh and by the way, the cameras themselves I have found out put off alot of heat. 
Posted by: nprev Jun 16 2016, 04:06 AM
Do you have a published, verified reference for this information, Stratespace? I too find it extremely difficult to believe that they plan to fly consumer-grade cameras on any Mars surface mission.
In fact, I find it impossible. I doubt very much that off-the-shelf GoPro hardware could be sterilized to meet PPPs, pass environmental qualification or meet reliability/mission assurance standards, and that's by no means a comprehensive list of requirements.
Posted by: mcaplinger Jun 16 2016, 04:16 AM

http://ippw2016.jhuapl.edu/docs/abstracts/Instrumentation.pdf page 18 has the system description but not the specific details.
I wasn't at this conference but it seems unlikely that someone would just make this stuff up.
Posted by: nprev Jun 16 2016, 04:23 AM
Mike, if you think it's credible then I'm 90% sold. Still, it seems like a very startling design choice with a large number of attendant risks, esp. for a Flagship-class mission like Mars 2020. Really want to verify this claim.
Posted by: James Sorenson Jun 16 2016, 04:38 AM
Commercial hardware has been slowly making its way to Mars. The Chemcam LIBS UV-VIS-NIR optical spectrometers are commercial spectrometers from Ocean Optics but were modified for the space enviornment and survival on Mars. So if the information Stratespace presented is true, and they do plan on using Chameleons and Gopros, I'd expect them to be modified as well to withstand the conditions, and during that process, extensively cleaned to satisfy PP protocols.
Posted by: mcaplinger Jun 16 2016, 05:01 AM
I think it's believable that they said they would use this hardware. Since I design and build space cameras for a living, you can likely predict how I feel about using a $300 commercial camera in such a context.
Posted by: Stratespace Jun 16 2016, 06:48 AM
edit: phiew, someone saved me by taking a picture of one of the slides: https://twitter.com/IGerth/status/743103067655114752
For your information, PUC stands for "Parachute Up look Camera", DDC for "Descent Stage down look camera", RUC for "Rover Up look camera" and RDC for "Rover Down look camera".
Posted by: climber Jun 16 2016, 07:36 AM
Hum. This will generate a lot of data. Even if low priority images, Will we have the chance to download everything?
Anyway, I wish we had one of these on Schiaparelli 
Posted by: Stratespace Jun 16 2016, 07:44 AM
Yep, this will generate at least ~1GB of data. Hard to transmit, but still feasible.
Posted by: James Sorenson Jun 16 2016, 08:00 AM
I'm still in alittle dis-belief purely in a technical perspective of the choice to use these cameras. But it's exciting and interesting as well. Hope you can understand our reluctance at first to believe it. But that slide is the confirmation. Hopefully all the's camera's make it through all the testing and qualifications and make it onboard! Thank you for presenting the information here.
Posted by: mcaplinger Jun 16 2016, 01:35 PM
"Notional" means they haven't decided yet.
Posted by: climber Jun 16 2016, 01:35 PM
So, I guess we can afford one camera labbeled UNMSF on Red Dragon in 2018
Well, I'm not sure how to "sell" this idea to you, Mike, but I'll be glad to get your feed-back on this. May be we can open a dedicated topic?
Posted by: nprev Jun 16 2016, 03:17 PM
Stratespace, thank you very much, and I also apologize for my initial disbelief. Extraordinary claims and evidence, of course. 
Very interesting that this schema is being seriously considered, yes. Makes a bit more sense given that their prime function is restricted to the late EDL phase, so they're just for engineering data acquisition and 'Kodak moments'; if any or all of them don't work it wouldn't be a show-stopper.
That said, integration is always where the dragons may lurk in terms of mission risk, and at first glance this seems to have no shortage of unsettling possibilities. Should be a lot of fun to work through them all.
Posted by: scalbers Jun 16 2016, 05:21 PM
Herobrine has already been on this
http://www.unmannedspaceflight.com/index.php?s=&showtopic=8196&view=findpost&p=230869
Posted by: nprev Jun 16 2016, 06:43 PM
...clearly we gotta be more careful what we post in jest lest it be taken seriously... 
You just don't buy a couple of $300 cams at an electronics store & slap them on to a top-of-the-line interplanetary mission with planned significant longevity, obviously. I can see GoPro getting a contract to build custom cams to reduce mass & comply with both vehicle interface requirements & PPPs. No idea if that would be favorable in terms of cost and performance vs. building them in-house or procuring them from flight-proven vendors, but it really would have to be in order to offset the increased risk level.
Posted by: Stratespace Jun 16 2016, 08:48 PM
One of the main issues is to decouple the GoPros from the spacecraft onboard software to avoid any pollution in case of firmware crash. The validation of GoPro's firmware is very far from those of space software. If the interface is still USB (not native at all in space hardware), one can imagine there will be a dedicated hardware to ensure the proper interface and soft safety. Not a small business.
Posted by: nprev Jun 16 2016, 09:15 PM
No, not at all. I strongly suspect that this idea will be off the table in short order for those reasons alone.
Posted by: Stratespace Jun 16 2016, 09:25 PM
Yes maybe. But it went through the clearance procedures in JPL up to a publication and presentation at a conference. Not a big deal, but... still an official publication toward the scientific/engineering community.
We may suspect those details have been discussed and considered not a show stopper so far. I cannot imagine JPL presenting fairytales in a project that will launch 4 years from now.
Posted by: dvandorn Jun 22 2016, 11:16 PM
The cameras on the descent stage will obviously need to send and store their data real-time to the rover, obviously, for transmission back to Earth after landing.
Is there any advantage to making this a wireless connection, which can then also provide video from rover release to the end of the fly-away maneuver? That could provide an initial low-level flyover of a section of the local terrain where the rover won't likely be allowed to go (contamination issues), and give more data about the entire site. Sort of a first survey along the lines of the proposed hopper-copter's aerial surveys. This could even use the same radio data channel that will later be used to connect the rover to the hopper-copter.
I'm just trying to think of ways to get the maximum value out of these cameras. Besides the extreme cool factor, of course...
-the other Doug
Posted by: Explorer1 Jul 16 2016, 12:37 AM
A microphone, at last! http://www.planetary.org/blogs/bruce-betts/2016/20160705-listen-up-microphones-on-mars.html
Mounted on the camera, for scientific purposes (to listen to the cracking noise from the laser), though I'm glad whatever the reason!
Posted by: Gerald Jul 16 2016, 09:18 AM
I'd expect to hear some occasional cracking of rocks near sunrise and sunset when temperature is changing rapidly. But maybe InSight is better equipped for this purpose.
Another conceivable application could be a https://en.wikipedia.org/wiki/Echo_sounding. By measuring signal travel times after a ChemCam shot you could reconstruct some 3d information about the environment; this would of course work better with more than one microphone. But zapping several targets might work, too. And you could learn something about the sound damping properties of the ground, which is related to roughness and hardness.
Combine this acoustic surface property map with visual, and maybe with thermal maps, and you get an enriched basis to select targets of interest for contact science.
Posted by: nprev Jul 16 2016, 10:29 PM
Gotta remember how exceedingly thin Mars' atmosphere is, though. I suspect that the only truly noisy part will be EDL, and even that's gonna sound pretty subdued compared to an equivalent event on Earth.
We'll probably hear sounds from the rover mechanisms via structural conduction, and perhaps there will be a windstorm or a direct hit by a dust devil that might produce a faint whistle or two, but short of that I suspect that Mars is very quiet indeed.
Posted by: climber Jul 17 2016, 10:42 AM
Will be surprised if Mars will not surprise...
Posted by: vjkane Jul 17 2016, 11:14 PM
Maybe they will just store the data on the microSD card and download it at leisure via a usb cable.
Posted by: scalbers Jul 17 2016, 11:22 PM
Would a LIDAR help with 3D mapping of the local terrain to help with stereo imaging and constructing 3D models?
Posted by: mcaplinger Jul 18 2016, 12:01 AM
After the descent stage flies away? You'd need a rather long cable.
Posted by: TheAnt Jul 19 2016, 03:23 PM
From Earth to Mars? That would require a seriously long USB cable, not to mention the need to use serious bug and virus detection before any transfer can be allowed.
Another risk is that if we have such a direct connection to Mars, it would not take long before we get the first spams with messages like:
I am the widow of the former president of Cryse. Help me transfer my 3 billion from Hellas to Syrtis Major, please send 10^7 Maritan rollads to my account to faciliate the transfer.

Posted by: vjkane Jul 20 2016, 01:43 PM
Another risk is that if we have such a direct connection to Mars, it would not take long before we get the first spams with messages like:
I am the widow of the former president of Cryse. Help me transfer my 3 billion from Hellas to Syrtis Major, please send 10^7 Maritan rollads to my account to faciliate the transfer.
I had been thinking of just a few inches to a bus in the rover, but a cable stretching all the way back to Earth would eliminate the need for those expensive relay orbiters.

Posted by: climber Aug 28 2016, 11:38 AM
There is the following information on AW&ST August 15-28 2016 issue regarding the microphone:
"SuperCam also will have a microphone, both to gather information about the targets being hit with the laser light and to collect more data on the Martian weather. Wind sounds will be correlated with wind-speed measurements collected by the rover's weather instruments, while the volume of sound generated by laser's "zap" is directly proportional to the hardness of the rocks". The quote is from Roger Wiens of Los Alamos, the PI of both ChemCam and SuperCam
This is much more than I was anticipating regarding sound conduction by Martian air. Must be very sensitive to collect such information. Most of us were thinking we'll listen only at rover's noises I'd said.
Posted by: Gerald Aug 28 2016, 12:34 PM
I don't think, that sound attenuation poses any significant issue on Mars on the meter scale, especially when relative humidity is very low.
With http://resource.npl.co.uk/acoustics/techguides/absorption/, for sound of 1000 Hz, I get
0.014 dB / m for 103 kPa at 0°C with 10% relative humidity, and
0.0255 dB / m for 0.6 kPa at -20°C with 1% relative humidity.
Above 10 kHz, it may be going to become an issue on the meter scale.
The microphone membrane, however, might be required to deal with reduced https://en.wikipedia.org/wiki/Sound_intensity, since the low-pressure atmosphere transports less sound energy for the same amplitude.
Posted by: rlorenz Oct 12 2016, 05:33 PM
The microphone membrane, however, might be required to deal with reduced
since the low-pressure atmosphere transports less sound energy for the same amplitude.
Yes, 6mb CO2 conveys sound quite happily over distances of a few meters. Here is some music played ('quite loud' in 1 bar air, but considerably
quieter here at 6mb simply because a loudspeaker diaphragm displacement at a given speed produces a lower sound pressure level simply because the
air density is lower, as you note). The sound is a bit distorted (ethereal, dare I say..?) because of reverberation/multipath between the parallel
metal walls of the chamber (these were tests I did a couple of weeks ago at the Mars Environment simulation chamber in Aarhus, Denmark).
There's also a lot of plant noise (electrical, rather than vibration/acoustic)
http://www.lpl.arizona.edu/~rlorenz/oxygene_on_Mars.mp3
More details to be presented at the Mars Atmosphere workshop in Granada in January
Ralph Lorenz
Posted by: pioneer Sep 18 2020, 12:42 AM
I know this is an old thread, but I was wondering if the video from the EDL cameras will be compressed before being sent to Earth like the first images from Curiosity's MARDI camera were compressed as the bandwidth was limited in the early days after landing. Does anyone know if Mars Odyssey and MRO will be in position to receive signals from Perseverance on landing day?
Posted by: mcaplinger Sep 19 2020, 10:54 PM
Regardless of phasing, there are typically two passes per day per orbiter (see https://trs.jpl.nasa.gov/handle/2014/44382 ) and MAVEN and perhaps TGO will also be available, but there's usually some uncertainty about the performance of early relay ops.
From the April 2020 MRO status for MEPAG https://mepag.jpl.nasa.gov/meeting/2020-04/Day3/14_MRO-for-MEPAG%202020_post.pdf
As for data return from the EDL cameras, that will probably be discussed in the pre-landing press kit and press conference.
Posted by: pioneer Sep 20 2020, 06:56 PM
From the April 2020 MRO status for MEPAG https://mepag.jpl.nasa.gov/meeting/2020-04/Day3/14_MRO-for-MEPAG%202020_post.pdf
As for data return from the EDL cameras, that will probably be discussed in the pre-landing press kit and press conference.
Thanks.
Posted by: mcaplinger Dec 10 2020, 03:30 AM
A paper describing the engineering cameras on M2020, including the EDL cameras and the TRN camera, is now online at https://link.springer.com/article/10.1007/s11214-020-00765-9 (open access). Enjoy.
Posted by: Brian Swift Dec 10 2020, 05:58 AM
Playing with the OSIRIS-REx sample collection images, I was wishing it had a microphone (I'm assuming a mic mounted to the hull would pick up debris impacts).
Posted by: Steve G Dec 10 2020, 03:32 PM
Thanks. That was a really good read.
Posted by: mcaplinger Dec 10 2020, 04:29 PM
We weren't that happy with it, since it's a whole lot of different stuff roughly stitched together and sort of veers between topics. But it didn't make sense to write separate papers either and it gets the basics across.
You'll note that the Gopros considered originally didn't make the cut, but I know nothing about what the story is with that -- all I worked on was LCAM.
Posted by: Phil Stooke Dec 10 2020, 08:55 PM
In answer to a question posed above about EDL data relay: MRO looks like it will be doing this.
MRO: Providing radar 3D subsurface mapping of ice deposits and imagery and spectroscopy
of surface features and weather; also supporting landing site assessments. Developing Bent
Pipe Communications in support of Mars 2020 landing. Will continue to serve as major relay
asset for surface missions (Curiosity, InSight, Perseverance, ExoMars).
This is from this recent report:
https://www.lpi.usra.edu/pac/presentations/1120/02-MEPUpdate-Ianson-%20PACNov2020.pdf
Phil
Posted by: Tom O'Reilly Feb 17 2021, 06:11 AM
Thanks Mike - great paper!
And lo and behold - there are two USB3 hubs on the EDLCAM system; one on the aeroshell and one in the descent stage (Figure 28)
Posted by: Tom O'Reilly Feb 17 2021, 06:16 AM
MRO: Providing radar 3D subsurface mapping of ice deposits and imagery and spectroscopy
of surface features and weather; also supporting landing site assessments. Developing Bent
Pipe Communications in support of Mars 2020 landing. Will continue to serve as major relay
asset for surface missions (Curiosity, InSight, Perseverance, ExoMars).
This is from this recent report:
https://www.lpi.usra.edu/pac/presentations/1120/02-MEPUpdate-Ianson-%20PACNov2020.pdf
Phil
Also this: https://www.jpl.nasa.gov/news/the-mars-relay-network-connects-us-to-nasas-martian-explorers
Posted by: Tom Tamlyn Feb 17 2021, 07:25 PM
Fascinating Wired article about Jason Achilles Mezilis, a rock musician and space enthusiast who successfully pitched to be hired as a consultant for the Perseverance microphone team. https://www.wired.com/story/musician-who-designed-microphone-mars/
Mezilis was recently selected as PI for an imaging system for moon landers, the Lunar ExoCam project. https://www.space.com/lunar-exocam-landing-video-moon-surface.
Note for Mods: Previous discussion of Perseverance microphones is distributed among several existing threads, including this one. I chose this one because one of the microphones is designed to record EDL. There is a Tech, General and Imagery subforum for the MER mission.You might at some point consider setting up something similar for the Perseverance science and engineering instruments, so that information doesnt get lost in what we hope will be a long series of narrative threads.
Posted by: deedan06 Sep 8 2023, 01:20 PM
Sorry if you guys already know this, but the EDL-Cams are actually still alive! The Rover Down look Camera seems to act as a MARDI succesor, however it takes images during drives. I Have no clue how they manage to transmit over 900 images on one day, probably using video compression. The capability to act fully independent seems to allow them to image while driving. The Rover uplook camera is also still alive and seems to act as skycams pal. I can't see much on the raw images, but if you edit the images togather you probably get better results. The Lander Vison system Camera shows no signs of activity however. The cameras seem to be reactivated around sol 700.
You can look at their images at the row images site, however you have to activate the "show movie frames" box for most of them to show up. If you have a very good internet connection I can also reccomend using this (https://areobrowser.com/#/mode=perseverance&instruments=ED) site to gat an overview and see rough video versions of the imagery. The Sol dates seem to only indicate the date of transmission and not when the images where taken, which is especially noticable for the RDC.
I have found no NASA statement on the surprisingly long live of the cameras although I haven't looked very hard. Once again sorry If I just repeat old info.
Powered by Invision Power Board (http://www.invisionboard.com)
© Invision Power Services (http://www.invisionpower.com)