Endeavour Drive - Drivability analysis |

  |
Endeavour Drive - Drivability analysis |
 Sep 23 2008, 09:22 PM Sep 23 2008, 09:22 PM
Post
#211
|
|
 Dublin Correspondent  Group: Admin Posts: 1799 Joined: 28-March 05 From: Celbridge, Ireland Member No.: 220 |
"Some sort of Fourier analysis" on subsections of the HiRISE has been mentioned by Paolo and James. I think that's a good approach but I can't visualize how you would define the parameters for the transform in order to get algorithm for the sort of texture matching that's needed. The general idea though seems to me to be a good approach to try for any of us who have some coding ability. If it works we can then process the whole thing repeatedly (and at various scales) and get something that can then be thrown at the full traverse HiRISE images.
Geert's comment in post 168 got me thinking that something like a Hough transform would be a better way of identifying the combination of scale, orientation and consistency of each subregion. I did some work with Hough Transforms last year and they're simple enough to implement so I'm thinking that I'll give that a try but I'm absolutely swamped with work at the moment ( I'm working with Banks these days, which is interesting to say the least) and I'm unlikely to be able to build anything competent in the timescale we're looking at so I'm just throwing this out there in case anyone else is in a position to experiment. |
 |
 
|
|
Sep 23 2008, 09:33 PM
Post
#212
|
|
|
Member Group: Members Posts: 104 Joined: 1-June 08 Member No.: 4172 |
QUOTE (imipak @ Sep 23 2008, 04:32 PM)  There's no reason we couldn't start on a Mechanical Turk process I've been working for the past two days on trying to get the JP2 into Python (Google App Engine) so help with installing the JasPer plugin for ImageMagick would be greatly appreciated. ImageMagick can automatically split an image into hundreds of named tiles, but it can't read JP2s without JasPer. And JasPer is only available as C source. The JP2 format is evidently quite a processing bottleneck. Anyway, I can start development on the mechanical turkish front-end without the images (does http://helpoppy.appspot.com sound good?); I just don't want to be redundant, so if anyone else is attempting the same thing please speak up. |
|
|
|
|
Sep 23 2008, 09:58 PM
Post
#213
|
|
 Member Group: Members Posts: 699 Joined: 3-December 04 From: Boulder, Colorado, USA Member No.: 117 |
QUOTE (helvick @ Sep 23 2008, 09:22 PM) "Some sort of Fourier analysis" on subsections of the HiRISE has been mentioned by Paolo and James. I think that's a good approach but I can't visualize how you would define the parameters for the transform in order to get algorithm for the sort of texture matching that's needed. Hmmm- it seems like Fourier analysis would handle this problem rather well- the dunes should provide a strong peak in the Fourier transform, and the wavelength and amplitude of that peak, if it could be identified automatically, should describe the size and density of the dunes (which are the questions of most interest for driveability) quite well. That's the theory, anyway... John |
|
|
|
|
Sep 23 2008, 10:05 PM
Post
#214
|
|
|
Founder Group: Chairman Posts: 14432 Joined: 8-February 04 Member No.: 1 |
For the laypeople among us (that's me) - is that sort of pattern essentially why dunes disappear when I've zoomed out to a certain point.
So - 100% - the flat parts look flat, everything else looks lumpy Zoom out a bit - maybe 25% - the smaller, navigable dunes vanish, but the bigger scarier dunes are still obvious Zoom out to 6.25% and it's almost all smooth Doug |
|
|
|
|
Sep 23 2008, 10:29 PM
Post
#215
|
|||
 Senior Member Group: Moderator Posts: 2262 Joined: 9-February 04 From: Melbourne - Oz Member No.: 16 |
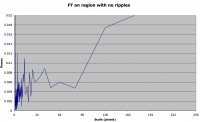
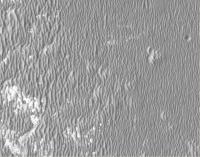
QUOTE (john_s @ Sep 23 2008, 10:58 PM) Hmmm- it seems like Fourier analysis would handle this problem rather well- the dunes should provide a strong peak in the Fourier transform, and the wavelength and amplitude of that peak, if it could be identified automatically, should describe the size and density of the dunes (which are the questions of most interest for driveability) quite well. That's the theory, anyway... Yes, that is what I was thinking. I've started doing Fourier transforms on 256 pixel (east-west perpendicular to the ripples) slices and have confirmed to myself that I can at least detect ripples. e.g. No ripples:
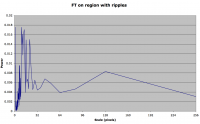
Most of the power is on large scales Ripples:
Big peaks at 10-15 pixels (the scale of the ripples)  I'm sure the signature will change significantly as the ripple size changes. It's bedtime for me now, but tomorrow I'll put the code in place to run these FT's over the whole image and then make maps of various characteristics of the Fourier profiles generated. James -------------------- |
||
|
|
|
||
|
Sep 23 2008, 10:46 PM
Post
#216
|
|
 Senior Member Group: Admin Posts: 4763 Joined: 15-March 05 From: Glendale, AZ Member No.: 197 |
Wow. Just amazing James.
Have you wondered if maybe some poor guy on the MER team will be laid off once you complete this?  
-------------------- If Occam had heard my theory, things would be very different now.
|
|
|
|
|
Sep 23 2008, 11:19 PM
Post
#217
|
|
|
Senior Member Group: Members Posts: 1582 Joined: 14-October 05 From: Vermont Member No.: 530 |
When James also gets a job with Google, we'll just have to expect him to use his company-funded free time on just this sort of thing.
|
|
|
|
|
Sep 23 2008, 11:33 PM
Post
#218
|
|
 Senior Member Group: Moderator Posts: 3431 Joined: 11-August 04 From: USA Member No.: 98 |
Darn. I wish I'd paid more attention in math class...
|
|
|
|
|
Sep 24 2008, 12:43 AM
Post
#219
|
|
|
Member Group: Members Posts: 202 Joined: 9-September 08 Member No.: 4334 |
Is there any 'brute force/raw time-consuming' stuff I could do to help? I lack programming skills or any knowledge of Fourier transforms, but I have free time...
|
|
|
|
|
Sep 24 2008, 01:56 AM
Post
#220
|
|||
|
Member Group: Members Posts: 104 Joined: 1-June 08 Member No.: 4172 |
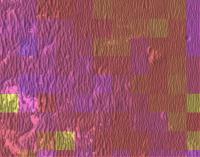
As I have little to no knowledge of Fourier transforms, I made a much simpler algorithm and applied it to a screenshot of the IAS viewer. It is hard to believe that it would be of any use, though, as it seems easily confused by the bright spots.
|
||
|
|
|
||
|
Sep 24 2008, 02:25 AM
Post
#221
|
|
 Member Group: Members Posts: 236 Joined: 5-June 08 From: Udon Thani Member No.: 4185 |
QUOTE (jamescanvin @ Sep 24 2008, 05:29 AM) Yes, that is what I was thinking. I've started doing Fourier transforms on 256 pixel (east-west perpendicular to the ripples) slices and have confirmed to myself that I can at least detect ripples. e.g. I'm sure the signature will change significantly as the ripple size changes. It's bedtime for me now, but tomorrow I'll put the code in place to run these FT's over the whole image and then make maps of various characteristics of the Fourier profiles generated. Wow! This is amazing. I was myself just trying to code something like this, running a Fourier or a Hough transform on the HiRISE images, I once tried to do something similar to detect ocean waves from satellite imagery, but I'm nowhere near yet to producing anything like this, it's a lot of work and like anyone else I'm swamped with other jobs. But I guess what we might try next is running the same analysis on a 'known' traject, let's say part of the road to victoria, then we can see how such an analysis corresponds to known terrain, making certain we are on the right track. |
|
|
|
|
Sep 24 2008, 03:41 AM
Post
#222
|
|
|
Junior Member Group: Members Posts: 27 Joined: 22-September 08 Member No.: 4349 |
I swore to myself that I wouldn't mess with the route map proposed in post #209, but after running a little pattern recognition program to the SE of Sophi, I noticed a feature that was missed earlier. ...wondering if a jog to the cluster 260 m SE of Sophi is warranted, if a more easterly route to the South is even feasible.
I've attached version 2.0 of my proposed route, with the hope of seeing some of the experts here give this a closer look. The drive from the second to third points of interest would certainly be a "nasty" piece of work. There are some big dunes here, but also enough pavement to make it appear that there's actually several plausible tracks through this tight spot in the maze.
Attached File(s)
|
|
|
|
|
Sep 24 2008, 04:22 AM
Post
#223
|
|
 Senior Member Group: Members Posts: 4246 Joined: 17-January 05 Member No.: 152 |
I don't think this has been mentioned yet, but I gather we are interested in quite broad characterization here, eg "easily drivable" vs "purgatory-ish". Fiddling with imagej, I noticed that the smaller ripples (which tend to have shorter crest to crest separation) can be quite easily eliminated from an image by gaussian blurring with kernal size a bit larger than the separation. The bigger, nastier ripples are still visible after this blurring. Perhaps this would help either manual or automatic approaches. After the blurring you could use some tool such as FFT or a tool that measures the variance across the image to find the areas that have most "power". I expect this to give you problems around exposed bedrock, though.
|
|
|
|
|
Sep 24 2008, 05:01 AM
Post
#224
|
|
|
Member Group: Admin Posts: 976 Joined: 29-September 06 From: Pasadena, CA - USA Member No.: 1200 |
QUOTE (Oersted @ Sep 23 2008, 07:49 AM) Ok, it is great fun to make route maps, but obviously not what Paolo needs, as he said so well. What´s needed is an overview map, with ripple type areas clearly delineated. I still didn´t see a better suggestion, IMHO, than the one I posted earlier in the thread and which I copy here below. Sorry for the impertinence, but I think we should focus on what Paolo is asking for and not go out in a lot of fascinating but not really relevant tangents, with poetry, specific route maps, etc. This is the first time we´re getting a request from the rover team for actual help. We got it because the cumulative talents at UMSF are very impressive. But let´s focus those talents on the job at hand! I do not want to impose a "mission statement" . I'm a guest here, and am trying, like you, to do something useful for this long traverse. In the past having such a traversability map has been very useful and relatively painless to generate and am sure this time it will be more difficult. It worked pretty well in the past but I do not want to suppress random ideas. I have to say that suggestions for science targets are way above my head, I do not have the qualifications to understand and evaluate those. I'm pretty sure some scientists are following the forum and they might pick up some ideas.Regarding comparing drives pre-VC to drives after VC, I think this is best done by us drivers. We have learned so much after we loaded the new version of the FSW in 2006 which we have been using since sol B950 and we also have learned new tricks. Unfortunately these are details that very likely I cannot discuss in public an even if I could it would require extensive driver training to appreciate. I do not mean to be dismissive, no greater pleasure to explain all the technical details to Mars geeks, it is just rules I have to follow to keep my job. I also have to say that unfortunately poetry is completely lost on me since English is not my primary language (I'm Italian). Paolo -------------------- Disclaimer: all opinions, ideas and information included here are my own,and should not be intended to represent opinion or policy of my employer.
|
|
|
|
|
Sep 24 2008, 05:05 AM
Post
#225
|
|
 Senior Member Group: Members Posts: 3419 Joined: 9-February 04 From: Minneapolis, MN, USA Member No.: 15 |
I'm all for the Fourier transforms and such, but I also think it's important to check these areas visually, as well. And for one good reason -- almost any mathematical analysis is no more reliable than the base data it has to work with.
I have in mind the following scenario: We run Fourier analyses transverse to the predominant ripple orientation, since that's what gives you crest-to-crest distances and also height estimations. But it also fails to capture, in any meaningful way, the same type of information for the crossover ripples that close off all the inter-ripple lanes after only a few tens of meters. Remember how we progressed through the Etched Terrain? The inter-ripple troughs would run for 10 to 20 meters, and then a crossover ripple would close off that lane. We had to then climb over a ripple to get to the next best trough over, one side or the other, if the crossover ripple appeared impassable (and it often did). When I look carefully at the full res images of some spots along the south route, I see the same kind of crossover ripple activity, and thus we'll see the same need to climb these ripples if we want to continue to move. But because of their deviation from the general north-south orientation, I'm concerned that perhaps Fourier analyses aren't likely to collect enough data about these ripples to be informative of the real trafficability. That's why I think we also need eyes looking through these mazes, to find likely routes that involve climbing over ripples we're certain Oppy can handle. But, on that score -- if, as Paolo has said, we have to keep in mind the 5-wheel scenario, we're really going to need to know just how easily a 5-wheeled Oppy is going to be able to climb or cross ripples. Without some feel for the real impact dragging a wheel will have on crossing ripples, I don't know how easily we can project a safe path into heavier ripple fields. I will say this -- I've taken another good full-res look at the terrain to the east-northeast, and while it looks very smooth at lower resolutions, when you look at it in full res you can see it's covered with ripples to at *least* the degree we saw at Viking and Vostok, and they, too, have a predominant north-south trend. If we can't handle moving steadily transverse to ripples of that size, then I guess the south route may be the best of a not-wonderful set of choices after all. Actually, one of the bigger reasons I had for wanting to take the east-northeast route above the worst of the ripple fields is that there is actually some exposed outcrop on rim remnants at the very northern extent of Endeavour's rimwall. What we see along the northwest quadrant looks a lot like a rim landform eroded way down and then covered over by the same evaporite groundcover that we've been seeing all along. Just seems to me that it's overall less mileage to more ancient rimwall outcrops if you go by the east-northeast route, since you won't have to backtrack back 5 km north to get to them in the northern rimwall, or go yet another 10 km south to get to outcrops on the southern rimwall... Of course, HiRISE images of the various sections of the rimwalls will help us decide just what we're actually targeting first at Endeavour, so perhaps we should wait for those before making the final decision as to the direction from which to approach. -the other Doug -------------------- The trouble ain't that there is too many fools, but that the lightning ain't distributed right. -Mark Twain
|
|
|
|
|

|
Lo-Fi Version | Time is now: 27th April 2024 - 02:08 PM |
|
RULES AND GUIDELINES Please read the Forum Rules and Guidelines before posting. IMAGE COPYRIGHT |
OPINIONS AND MODERATION Opinions expressed on UnmannedSpaceflight.com are those of the individual posters and do not necessarily reflect the opinions of UnmannedSpaceflight.com or The Planetary Society. The all-volunteer UnmannedSpaceflight.com moderation team is wholly independent of The Planetary Society. The Planetary Society has no influence over decisions made by the UnmannedSpaceflight.com moderators. |
SUPPORT THE FORUM Unmannedspaceflight.com is funded by the Planetary Society. Please consider supporting our work and many other projects by donating to the Society or becoming a member. |
|