

Perseverance Imagery, technical discussion of processing, cameras, etc. |

  |
Perseverance Imagery, technical discussion of processing, cameras, etc. |
 Mar 14 2021, 08:17 PM Mar 14 2021, 08:17 PM
Post
#91
|
|
|
Junior Member  Group: Members Posts: 95 Joined: 11-January 07 From: Amsterdam Member No.: 1584 |
QUOTE (fredk @ Mar 14 2021, 07:13 PM)  Has anyone figured out how to sort the images at mars.nasa.gov/mars2020/multimedia/raw-images/ by time taken? Not from the website directly. For the arm animation I made earlier I sorted the JSON entries on the spacecraft clock time which is given as "extended/sclk". (and can also be found as part of the image filename) -------------------- |
 |
 
|
|
Mar 15 2021, 10:57 AM
Post
#92
|
|
|
Newbie Group: Members Posts: 6 Joined: 20-April 05 Member No.: 265 |
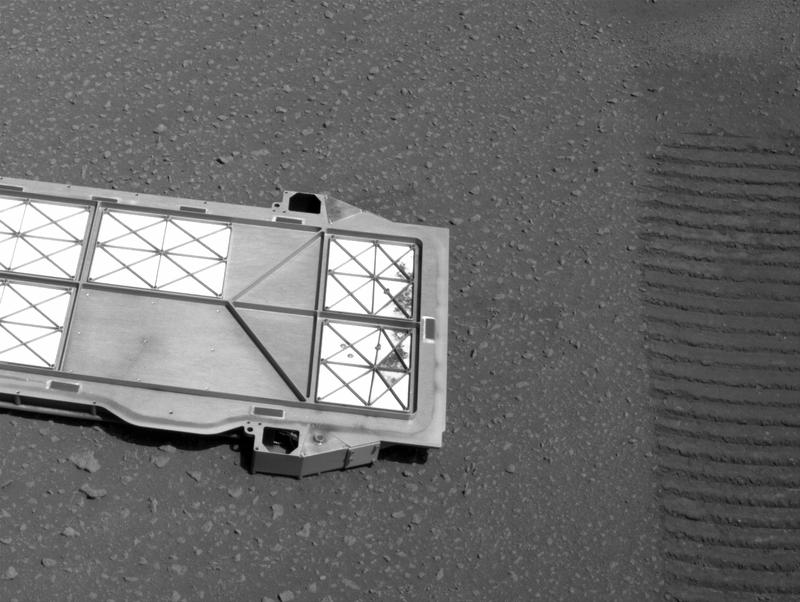
Does anybody know this plate's purpose?
 Here are some other pictures:  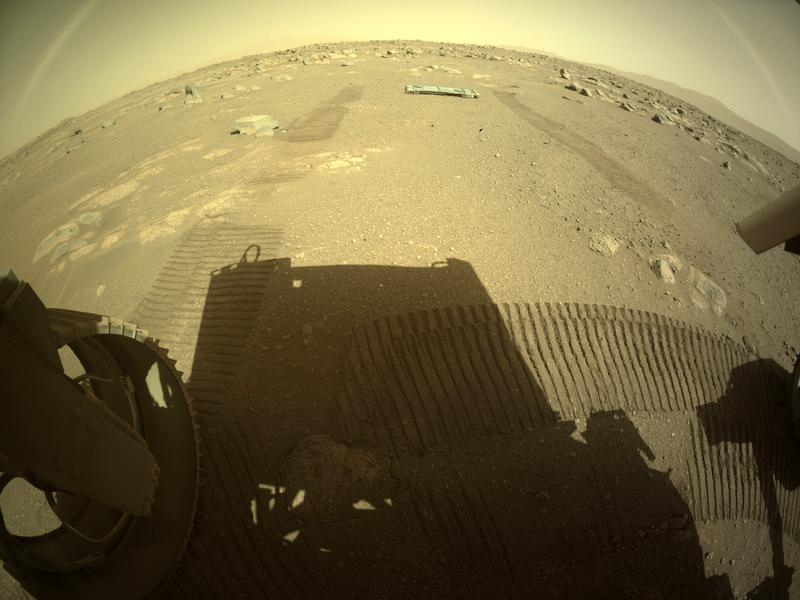 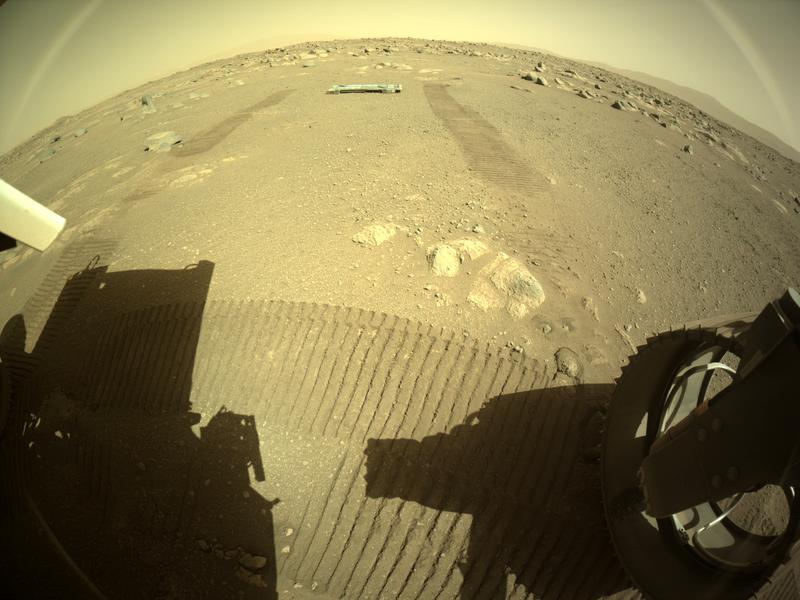
|
|
|
|
|
Mar 15 2021, 11:22 AM
Post
#93
|
|
 Senior Member Group: Members Posts: 2430 Joined: 30-January 13 From: Penang, Malaysia. Member No.: 6853 |
QUOTE (Hynee @ Mar 15 2021, 06:57 PM) Does anybody know this plate's purpose? It's a 'Bellypan' that protected the Adaptive Caching Assembly (ACA) since launch, but especially during the final part of EDL... Surface operations on Mars require the Sample Handling Assembly (SHA) to extend approximately 200 mm (~8 inches) below the Rovers bellypan. Therefore, an ejectable belly-pan was implemented directly below the Adaptive Caching Assembly (ACA) volume, which was released after landing to provide the SHA with an unobstructed volume to extend into during operations. Surface features are then assessed via Rover imaging prior to SHA motion to prevent contact with potential obstacles below the Rover. Extracted from this PDF titled: Mars 2020 Rover Adaptive Caching Assembly: Caching Martian Samples for Potential Earth Return |
|
|
|
|
Mar 15 2021, 11:25 AM
Post
#94
|
|
|
Newbie Group: Members Posts: 6 Joined: 20-April 05 Member No.: 265 |
QUOTE (PaulH51 @ Mar 15 2021, 10:22 PM) It's a 'Bellypan' that protected the Adaptive Caching Assembly (ACA) since launch, but especially during the final part of EDL... Surface operations on Mars require the Sample Handling Assembly (SHA) to extend approximately 200 mm (~8 inches) below the Rovers bellypan. Therefore, an ejectable belly-pan was implemented directly below the Adaptive Caching Assembly (ACA) volume, which was released after landing to provide the SHA with an unobstructed volume to extend into during operations. Surface features are then assessed via Rover imaging prior to SHA motion to prevent contact with potential obstacles below the Rover. Extracted from this PDF titled: Mars 2020 Rover Adaptive Caching Assembly: Caching Martian Samples for Potential Earth Return Thanks! |
|
|
|
|
Mar 15 2021, 09:19 PM
Post
#95
|
|
|
Junior Member Group: Members Posts: 59 Joined: 4-July 08 Member No.: 4251 |
QUOTE (Hynee @ Mar 15 2021, 05:57 AM) Does anybody know this plate's purpose? FYI this event is discussed in the regular thread: http://www.unmannedspaceflight.com/index.p...=8608&st=60 I think this thread here is supposed to be focused on imagery, e.g. technical discussion of processing, cameras, metadata etc. ADMIN: Chris is correct. Let's please post mission event pictures such as the panel deployment in the real-time progress threads (Perseverance Early Drives being the current one) and reserve this thread for technical discussion of the imagery systems and methods. |
|
|
|
|
Mar 16 2021, 12:02 PM
Post
#96
|
|
|
Junior Member Group: Members Posts: 20 Joined: 6-August 20 Member No.: 8852 |
After I installed the required plugins,how to perform batch debayer in ImageJ and GIMP software?
Need an installation script, right? How to do it?  |
|
|
|
|
Mar 16 2021, 12:39 PM
Post
#97
|
|
|
Member Group: Members Posts: 102 Joined: 29-January 10 From: Poland Member No.: 5205 |
I use FitsWork to debayer images. It's great!
-------------------- Adam Hurcewicz from Poland
|
|
|
|
|
Mar 16 2021, 01:45 PM
Post
#98
|
||
|
Junior Member Group: Members Posts: 20 Joined: 6-August 20 Member No.: 8852 |
QUOTE (Adam Hurcewicz @ Mar 16 2021, 08:39 PM) I use FitsWork to debayer images. It's great! Can it be processed in batches? How to do it? 
|
|
|
|
|
|
|
Mar 16 2021, 11:39 PM
Post
#99
|
|
|
Member Group: Members Posts: 808 Joined: 10-October 06 From: Maynard Mass USA Member No.: 1241 |
use the command-line interface to your tool (if it has one) and a batch file.
-------------------- CLA CLL
|
|
|
|
|
Mar 17 2021, 12:13 AM
Post
#100
|
|
|
Junior Member Group: Members Posts: 20 Joined: 6-August 20 Member No.: 8852 |
QUOTE (PDP8E @ Mar 17 2021, 07:39 AM) use the command-line interface to your tool (if it has one) and a batch file. I get it, it's great! 
|
|
|
|
|
Mar 17 2021, 12:14 AM
Post
#101
|
|
|
Junior Member Group: Members Posts: 20 Joined: 6-August 20 Member No.: 8852 |
QUOTE (Adam Hurcewicz @ Mar 16 2021, 08:39 PM) I use FitsWork to debayer images. It's great! Yeah,I get it, it's great! |
|
|
|
|
Mar 22 2021, 07:30 PM
Post
#102
|
|
|
Member Group: Members Posts: 240 Joined: 18-July 06 Member No.: 981 |
QUOTE (phase4 @ Mar 14 2021, 09:17 PM) Not from the website directly. For the arm animation I made earlier I sorted the JSON entries on the spacecraft clock time which is given as "extended/sclk". (and can also be found as part of the image filename) Do you have any insight into the MET portion of the filename. When did MET start (ie. when was it zero?) At the moment its around 0669527872. I would like to rename some of the raw images in the order they were taken and where pairs were taken keep those together - I think they would be taken at about the same MET anyway so sorting by MET should work to keep stereo pairs together. MET seems to have been wrong on some images, or at least, the MET is the time the image was uploaded by the spacecraft rather than the time it was taken by the camera. Especially the EDL images. Or have they fixed that now? Thanks! |
|
|
|
|
Mar 22 2021, 11:35 PM
Post
#103
|
|
 Senior Member Group: Members Posts: 4251 Joined: 17-January 05 Member No.: 152 |
The sclk (mission time) filename (and json) field appears to start on Jan 1st, 2000 - see here. And yeah, that field is still incorrect on at least some EDL camera images.
|
|
|
|
|
Mar 23 2021, 02:58 AM
Post
#104
|
|
|
Senior Member Group: Members Posts: 2517 Joined: 13-September 05 Member No.: 497 |
QUOTE (fredk @ Mar 22 2021, 03:35 PM) The sclk (mission time) filename (and json) field appears to start on Jan 1st, 2000... 0 is 2000-001T11:58:55.816 ("epoch of J2000" in Coordinated Universal Time.) This then drifts as a function of rover clock rate and is tracked by the NAIF file that Fred linked to, so you need to use the NAIF function scs2e or something like that to get a usable time. https://naif.jpl.nasa.gov/pub/naif/toolkit_...C/req/sclk.html -------------------- Disclaimer: This post is based on public information only. Any opinions are my own.
|
|
|
|
|
Mar 23 2021, 11:05 AM
Post
#105
|
|
|
Senior Member Group: Members Posts: 2430 Joined: 30-January 13 From: Penang, Malaysia. Member No.: 6853 |
Hope this is the right thread for this question?
The SHERLOC imager is said to be a direct build to print version of the MAHLI imager on MSL. With MAHLI images the focus motor count is provided on the raw image server, using that count enables users to approximate the distance and scale of 'close-up' / 'in-focus' MAHLI images. The SHERLOC images returned so far don't appear to have a motor count on the raw image server (that I can find) Is the SHERLOC motor count provided on an image JSON feed somewhere? Any pointers would be appreciated, as I'd hope to check it's my use of the count using targets like the PIXL calibration target where its exact size is known. Then I can use it for scaling the geological targets in the future. TIA 
|
|
|
|
|

|
Lo-Fi Version | Time is now: 5th June 2024 - 08:04 PM |
|
RULES AND GUIDELINES Please read the Forum Rules and Guidelines before posting. IMAGE COPYRIGHT |
OPINIONS AND MODERATION Opinions expressed on UnmannedSpaceflight.com are those of the individual posters and do not necessarily reflect the opinions of UnmannedSpaceflight.com or The Planetary Society. The all-volunteer UnmannedSpaceflight.com moderation team is wholly independent of The Planetary Society. The Planetary Society has no influence over decisions made by the UnmannedSpaceflight.com moderators. |
SUPPORT THE FORUM Unmannedspaceflight.com is funded by the Planetary Society. Please consider supporting our work and many other projects by donating to the Society or becoming a member. |
|



