Opportunity in a sandtrap, again, A thread for the topic |

  |
Opportunity in a sandtrap, again, A thread for the topic |
 May 29 2006, 12:22 PM May 29 2006, 12:22 PM
Post
#16
|
|
|
Senior Member  Group: Moderator Posts: 4279 Joined: 19-April 05 From: .br at .es Member No.: 253 |
I have the impression that those numbers are derived from the wheel turns plus instantaneous rover's attitude but doesn't take into account possible slippage.
It would explain the big difference with the actual movement, which was about 2-3m based on the "wheelmarks" (each 80cm, right?) which can be seen on fhaz images. |
 |
 
|
|
May 29 2006, 12:30 PM
Post
#17
|
|
 Senior Member Group: Moderator Posts: 2262 Joined: 9-February 04 From: Melbourne - Oz Member No.: 16 |
I don't think that's the case Doug - there are different numbers for images taken during drives e.g. auto-nav which can't be predicted beforehand. Look at my overlay of Tesh's route map from a few weeks back here. Also there is no way the rover was anticipated to have traveled 2m 'up' - that struck be as unusual when I first looked at the data before the images came down.
-------------------- |
|
|
|
|
May 29 2006, 12:35 PM
Post
#18
|
|
|
Senior Member Group: Moderator Posts: 4279 Joined: 19-April 05 From: .br at .es Member No.: 253 |
Just one remark about the z axis, James.
I think -- if I followed correctly these data on previous sols -- negative values are actually higher altitudes. Again, it would be consistent with climbing a dune for 24m. Edited: For instance, in the range of site 70xx (from sol 813 to 821) the rover was clearly moving downslope and the "z value" was increasing up to 1.3m on sol 821. |
|
|
|
|
May 29 2006, 12:45 PM
Post
#19
|
|
|
Senior Member Group: Moderator Posts: 2262 Joined: 9-February 04 From: Melbourne - Oz Member No.: 16 |
You could be right, I assumed it was down by the right hand rule but, haven't looked into if that fits observations.
EDIT: Ah, OK we actually agree, I misunderstood you, as I wrote the wrong thing in my first post. The z (actually c) vector IS down (-ve up) but I should have written that the rover was pitched UP as you correctly pointed out. -------------------- |
|
|
|
|
May 29 2006, 01:03 PM
Post
#20
|
|
|
Senior Member Group: Moderator Posts: 2262 Joined: 9-February 04 From: Melbourne - Oz Member No.: 16 |
Here is the tracking data for Purgatory and the North Erebus Incident (NEI)
NEI ..sol/602..::62::262::-26.2507::11.2459::-0.143594 ..sol/603..::62::308::-29.8538::7.33988::-0.498349 Purgatory ..sol/445..::55::136::2.50168::-73.9078::-0.857053 ..sol/446..::55::226::14.2636::-154.324::-5.38479 ~80m - Oppy only drove ~40m before getting stuck. Again notice how Oppy thought she had climbed 5.4m by merrily climbing Purgatory for 40m! So by my reckoning tosols incident is only about half as bad as Purgatory but 4-5 times worse than the NEI. We'll see in the next few sols - but I'm not too worried yet. Maybe It'll bring my Victoria arrival date back into play (973)  James -------------------- |
|
|
|
| Guest_Sunspot_* |
May 29 2006, 01:52 PM
Post
#21
|
|
Guests |
How did it happen? I thought they put lots of drive precautions in place after the purgatory incident?
|
|
|
|
|
May 29 2006, 01:53 PM
Post
#22
|
|
|
Senior Member Group: Members Posts: 2921 Joined: 14-February 06 From: Very close to the Pyrénées Mountains (France) Member No.: 682 |
A few questions :
It seams to me that rear weels didn't get stucked, do you agree on this? Anyway, are the measurements you show been taken on front weels, all weels? Just wondering what's the logic Oppy's got when she feels she's gona be stucked : stop all weels and wait or what else? We also had pictures of the same sol from Pancam and Navcam. Do you know if Oppy's programmed to shot this kind of pictures even she detect a "big" slipage problem or if the pictures have been taken before been stucked in this case? Thanks Climber -------------------- |
|
|
|
|
May 29 2006, 02:29 PM
Post
#23
|
|
|
Founder Group: Chairman Posts: 14432 Joined: 8-February 04 Member No.: 1 |
QUOTE (Sunspot @ May 29 2006, 02:52 PM)  How did it happen? I thought they put lots of drive precautions in place after the purgatory incident? A blind drive is still a blind drive. Previously - they would do blind drives "command 6m driving that way" and then autonav "keep going for X metres toward a goal, avoiding obstacles". Then - visidom could be added into it, "drive for X, then check for slippage, then drive for X and check for slippage again etc" But the terrain here looked so easy, I wouldn't be suprised if they blind-drived it for 25m. Just bad luck really. I think the rear wheels are more dug in than the front, as the rover was driving backwards at the time. I think, looking at the terrain that it was driving into, that actually a bad turn might have occured. I can't imagine they'd blind drive into this stuff.. http://qt.exploratorium.edu/mars/opportuni...GBP1311R0M1.JPG Perhaps the preceeding turn did not occur as much as expected - I'm sure we'll get an explanation in the near future anyway. Doug |
|
|
|
|
May 29 2006, 02:35 PM
Post
#24
|
|||
|
Senior Member Group: Moderator Posts: 4279 Joined: 19-April 05 From: .br at .es Member No.: 253 |
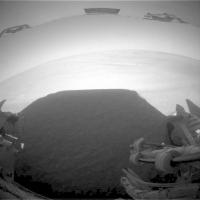
> It seams to me that rear weels didn't get stucked, do you agree on this?
This is an "enhanced rhaz" image; if the wheels are stucked or not is something we'll know once they put the reverse.
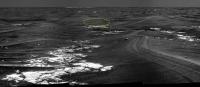
> Anyway, are the measurements you show been taken on front weels, all weels? All wheels I would say. > Just wondering what's the logic Oppy's got when she feels she's gona be stucked : stop all weels and wait or what else? Afaik, there is no "felling I'm gonna be stucked" but something like: - Take a navcam image - Command an X meters drive (X may be 5, 10, or some meters) - Take a navcam image and calculate the actual driven distance - If slippage (actual distance / planned distance) is greater then <param> abort drive, otherwise repeat next cicle. We also had pictures of the same sol from Pancam and Navcam. Do you know if Oppy's programmed to shot this kind of pictures even she detect a "big" slipage problem or if the pictures have been taken before been stucked in this case? Those pics are post-drive images, taken once the rover finished the drive normally or not. QUOTE (djellison @ May 29 2006, 04:29 PM) But the terrain here looked so easy, I wouldn't be suprised if they blind-drived it for 25m. Just bad luck really. This is a partial pancam mosaic taken on sol 828, two moves before the current position, in which I encircled the current location. It really looks easy, doesn't it? Except for a "fluffy" texture, I wouldn't say anything against going through this path.
|
||
|
|
|
||
|
May 29 2006, 02:46 PM
Post
#25
|
|
|
Founder Group: Chairman Posts: 14432 Joined: 8-February 04 Member No.: 1 |
I think the visidom combo they use is essentially blind-drive-for X metres, then do a short bump drive - compare before and after images of the bump to check what slippage is. If it's low, then blind drive for another X metres. It's a bit like walking a few paces, checking the terrain with a stick, then walking a few paces more. It's complex and convoluted, but just about the only way to do slippage check.
Real time slip-check ability is something that would be of huge benefit to future missions I'm sure ( i.e. Exomars and MSL) Doug |
|
|
|
|
May 29 2006, 04:13 PM
Post
#26
|
|
|
Senior Member Group: Moderator Posts: 4279 Joined: 19-April 05 From: .br at .es Member No.: 253 |
Speaking of "when should we expect a backwards movement", I would say sol 836 as the earliest assuming almost no further analysis except "put the reverse like on previous times".
|
|
|
|
|
May 29 2006, 04:52 PM
Post
#27
|
|
|
Senior Member Group: Members Posts: 2998 Joined: 30-October 04 Member No.: 105 |
This sort of mishap is not unexpected. Although these ripples are 'as old as the hills' by Earth standards, this is a dynamic locale by Mars standards, especially since we are approaching a major topographic feature. This 'change in the sand' happened as we left the Endurance plain and entered the rippled plains, it happened as we approached Erebus, and now that we approach Victoria...
Hindsight is always 20/20, but look at the ripples, they look subtley different here. This doesn't hurt my arrival time guesstimate a bit: I still say 'eventually'. --Bill -------------------- |
|
|
|
|
May 29 2006, 06:27 PM
Post
#28
|
|
 Senior Member Group: Members Posts: 1281 Joined: 18-December 04 From: San Diego, CA Member No.: 124 |
Pardon me if I missed this info - I am scanning the previous posts - but I notice the IDD is deployed in the original picture.
That wouldn't get deployed automatically after a drive? So someone has to be talking to Oppy today.... Or else they are trying to get shots to categorize the soil they are in. I love how Oppy chooses a holiday weekend in the US so we won't get any official updates today. 
-------------------- Lyford Rome
"Zis is not nuts, zis is super-nuts!" Mathematician Richard Courant on viewing an Orion test |
|
|
|
| Guest_Oersted_* |
May 29 2006, 06:30 PM
Post
#29
|
|
Guests |
Can't believe this, obviously one of the rover drivers was betting on a late arrival date at Victoria...

|
|
|
|
|
May 29 2006, 06:50 PM
Post
#30
|
|
|
Founder Group: Chairman Posts: 14432 Joined: 8-February 04 Member No.: 1 |
QUOTE (lyford @ May 29 2006, 07:27 PM) That wouldn't get deployed automatically after a drive? Yes it would. It get's pulled out automatically after EVERY drive as a matter of procedure since the trouble they had with it at Olympia. Doug |
|
|
|
|

|
Lo-Fi Version | Time is now: 28th May 2024 - 04:42 AM |
|
RULES AND GUIDELINES Please read the Forum Rules and Guidelines before posting. IMAGE COPYRIGHT |
OPINIONS AND MODERATION Opinions expressed on UnmannedSpaceflight.com are those of the individual posters and do not necessarily reflect the opinions of UnmannedSpaceflight.com or The Planetary Society. The all-volunteer UnmannedSpaceflight.com moderation team is wholly independent of The Planetary Society. The Planetary Society has no influence over decisions made by the UnmannedSpaceflight.com moderators. |
SUPPORT THE FORUM Unmannedspaceflight.com is funded by the Planetary Society. Please consider supporting our work and many other projects by donating to the Society or becoming a member. |
|