MSL Images & Cameras, technical discussions of images, image processing and cameras |

MSL Images & Cameras, technical discussions of images, image processing and cameras |
 Aug 16 2012, 11:05 PM Aug 16 2012, 11:05 PM
Post
#1
|
||
 Senior Member  Group: Members Posts: 2228 Joined: 1-December 04 From: Marble Falls, Texas, USA Member No.: 116 |
I'm still trying to figure out a number of things about the new images we are trying to work with. Assuming others are likewise trying to learn, I thought I would open this thread to create a place for such discussions.
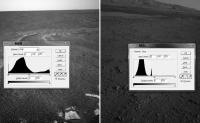
I'd like to start out with a comment about raw image contrast. There have been several postings in the main threads about whether or not the MSL raw images have been stretched like those from the MER missions. I am certainly no expert on this, but it looks to me as if the MSL images have not been stretched at all. I haven't tried to analyze all of the image types, but the hazcams and navcams have pixel brightness histograms that are very different from their MER counterparts. This attached image compares MER and MSL navcams along with their luminosity histograms.
The MSL images clearly are not using the entire, available range of brightness values, whereas the MER raws do. For this reason, the MSL raw images can usually be nicely enhanced by simply stretching the distribution of brightness across the full 256 value range. -------------------- ...Tom
I'm not a Space Fan, I'm a Space Exploration Enthusiast. |
|
 |
 
|
|
 |
|
Aug 19 2012, 02:51 PM
Post
#2
|
|
|
Newbie Group: Members Posts: 2 Joined: 6-August 12 Member No.: 6478 |
The signal to noise ratio and information content of this forum is outstanding. Let me contribute a small bit by providing links to technical documents about some of the MSL cameras, documents I found in the process of researching the MSL's computer system and internal network (about which I found virtually nothing):
The Mars Science Laboratory Engineering Cameras http://www-robotics.jpl.nasa.gov/publicati...ne/fulltext.pdf THE MARS SCIENCE LABORATORY (MSL) NAVIGATION CAMERAS (NAVCAMS) http://www.lpi.usra.edu/meetings/lpsc2011/pdf/2738.pdf THE MARS SCIENCE LABORATORY (MSL) HAZARD AVOIDANCE CAMERAS (HAZCAMS) http://www.lpi.usra.edu/meetings/lpsc2012/pdf/2828.pdf THE MARS SCIENCE LABORATORY (MSL) MARS DESCENT IMAGER (MARDI) FLIGHT INSTRUMENT http://www.lpi.usra.edu/meetings/lpsc2009/pdf/1199.pdf THE MARS SCIENCE LABORATORY (MSL) MARS HAND LENS IMAGER (MAHLI) FLIGHT INSTRUMENT http://www.lpi.usra.edu/meetings/lpsc2009/pdf/1197.pdf ---------- Some interesting heat shield documents: MEDLI System Design Review Project Overview http://www.mrc.uidaho.edu/~atkinson/Senior...ct_Overview.pdf Advances in Thermal Protection System Instrumentation for Atmospheric Entry Missions http://www.mrc.uidaho.edu/~atkinson/ECE591...ntations/Fu.ppt A relatively short but very interesting document about the engineering challenges of landing on Mars which discusses the advantages and disadvantages of the various possible methods: http://www.engineeringchallenges.org/cms/7126/7622.aspx As I said, I found virtually nothing about the Mars Compute Element (MCE) and the network(s) used within the lander to control MSL hardware (anyone know a good source, the more technical the better?), but I did find a tiny bit within this document starting on p41 where the electronics architecture is discussed. The bus used is redundant 2Mbps RS-422. The SAM uses BASIC keywords for its command language!: The Sample Analysis at Mars Investigation and Instrument Suite http://www.springerlink.com/content/p26510...08/fulltext.pdf Excerpt: The (SAM) CDH (Command and Data Handling) module (Fig.16) includes a number of functions. The CPU is the Coldfire CF5208 running at 20 MHz. The CDH (module) communicates with the Rover via redundant 2 Mbps high speed RS-422 serial bus along with a discrete interface (NMI). In the SAM software description starting on p47, I found this interesting tidbit: SAMs command system is a radical departure from prior spaceflight instrumentation. SAM is a BASIC interpreter. Its native command language encompasses the complete set of BASIC language constructsFOR-NEXT, DO-WHILE, IF-ENDIF, GOTO and GOSUBas well as a large set of unique built-in commands to perform all the specific functions necessary to configure and operate the instrument in all its possible modes. SAMs commands, which are BASIC commands with SAM-specific commands built in, are transmitted in readable ASCII text. This eliminates the need for a binary translation layer within the instrument command flow, and makes it possible for operators to directly verify the commands being transmitted. There are more than 200 commands built in to the SAM BASIC script language. ---------- And even though this is just a NASA Press Kit, it is satisfyingly detailed technically on various MSL systems: Mars Science Laboratory Landing http://mars.jpl.nasa.gov/msl/news/pdfs/MSLLanding.pdf And just for the heck of it, here's NASA's Viking Press Kit. How very far we have come, even with press kits: http://mars.jpl.nasa.gov/msl/newsroom/presskits/viking.pdf |
|
|
|
 CosmicRocker MSL Images & Cameras Aug 16 2012, 11:05 PM
CosmicRocker MSL Images & Cameras Aug 16 2012, 11:05 PM fredk I've noticed the same thing. It means for som... Aug 17 2012, 02:52 PM CosmicRocker I'm curious about something I am seeing in the... Aug 18 2012, 05:53 AM um3k That's the JPEG compression having an aneurysm... Aug 18 2012, 06:00 AM
fredk I've noticed the same thing. It means for som... Aug 17 2012, 02:52 PM CosmicRocker I'm curious about something I am seeing in the... Aug 18 2012, 05:53 AM um3k That's the JPEG compression having an aneurysm... Aug 18 2012, 06:00 AM
 Cargo Cult QUOTE (um3k @ Aug 18 2012, 07:00 AM) That... Aug 18 2012, 10:45 PM um3k QUOTE (Cargo Cult @ Aug 18 2012, 06:45 PM... Aug 18 2012, 10:50 PM ugordan QUOTE (um3k @ Aug 19 2012, 12:50 AM) It... Aug 18 2012, 11:04 PM um3k I suppose that sort of makes sense. It makes the p... Aug 18 2012, 11:16 PM mcaplinger QUOTE (um3k @ Aug 18 2012, 04:16 PM) I su... Aug 18 2012, 11:48 PM um3k I mean no offense, in fact I greatly admire you an... Aug 18 2012, 11:55 PM nprev Welcome, Winston, and thanks for a terrific first ... Aug 19 2012, 04:29 PM fredk Here's the FFT of the jpeged Bayer patterns, u... Aug 25 2012, 08:54 PM ngunn I'm totally fascinated by the various approach... Aug 25 2012, 09:35 PM Art Martin I hope this is the right section for this. I... Aug 26 2012, 04:25 PM ngunn QUOTE (Art Martin @ Aug 26 2012, 05:25 PM... Aug 26 2012, 05:09 PM john_s QUOTE (ngunn @ Aug 26 2012, 11:09 AM) It... Aug 26 2012, 05:55 PM Phil Stooke I don't do anaglyphs so I can't get techni... Aug 26 2012, 04:35 PM fredk I think what Art's suggesting is adjusting the... Aug 26 2012, 05:17 PM Art Martin Yes, that's exactly what I was wondering about... Aug 26 2012, 08:09 PM Pando Here's my attempt at creating a 3d anaglyph im... Aug 26 2012, 06:59 PM ngunn QUOTE (john_s @ Aug 26 2012, 06:55 PM) Ac... Aug 26 2012, 07:49 PM Roby72 A few remarks about the near focus of the mastcams... Aug 27 2012, 08:22 PM mcaplinger QUOTE (Roby72 @ Aug 27 2012, 01:22 PM) Di... Aug 27 2012, 08:55 PM PDP8E Back from a little vacation, and catching up on al... Aug 28 2012, 12:12 AM mcaplinger QUOTE (PDP8E @ Aug 27 2012, 05:12 PM) ...... Aug 28 2012, 12:49 AM ElkGroveDan Sounds like a great task for a trusted college int... Aug 28 2012, 04:06 AM mcaplinger QUOTE (ElkGroveDan @ Aug 27 2012, 09:06 P... Aug 28 2012, 04:44 AM ugordan QUOTE (mcaplinger @ Aug 28 2012, 06:44 AM... Aug 28 2012, 07:57 AM mcaplinger QUOTE (ugordan @ Aug 28 2012, 12:57 AM) w... Aug 28 2012, 02:03 PM JohnVV the jpg issue is mostly solved
http://imgbox.com/... Aug 28 2012, 07:30 AM ugordan QUOTE (JohnVV @ Aug 28 2012, 09:30 AM) th... Aug 28 2012, 07:59 AM RegiStax QUOTE (ugordan @ Aug 28 2012, 09:59 AM) J... Aug 28 2012, 09:40 AM jmknapp I wonder what the effective bits per pixel of the ... Aug 28 2012, 10:08 AM mcaplinger QUOTE (jmknapp @ Aug 28 2012, 03:08 AM) I... Aug 28 2012, 01:48 PM Airbag QUOTE (mcaplinger @ Aug 28 2012, 08:48 AM... Aug 28 2012, 02:39 PM jmknapp QUOTE (mcaplinger @ Aug 28 2012, 08:48 AM... Aug 28 2012, 07:47 PM mcaplinger QUOTE (jmknapp @ Aug 28 2012, 12:47 PM) W... Aug 28 2012, 08:25 PM jmknapp QUOTE (mcaplinger @ Aug 28 2012, 04:25 PM... Aug 29 2012, 12:32 AM Airbag That explains it all Joe - thanks! This made m... Aug 29 2012, 06:44 PM jmknapp QUOTE (Airbag @ Aug 29 2012, 02:44 PM) ..... Aug 29 2012, 07:01 PM Airbag Joe, I think you may have the wrong "law... Aug 29 2012, 07:29 PM mcaplinger QUOTE (Airbag @ Aug 29 2012, 11:44 AM) Th... Aug 29 2012, 07:48 PM Floyd mcaplinger We all really appreciate the fantastic... Aug 28 2012, 03:05 PM ugordan Airbag, also look up photon shot noise to see why ... Aug 28 2012, 03:09 PM Airbag Ugordan,
But photon shot noise is less of an issu... Aug 28 2012, 04:17 PM mcaplinger QUOTE (Airbag @ Aug 28 2012, 09:17 AM) Bu... Aug 28 2012, 04:22 PM Airbag I was looking at shot noise from a S/N point of vi... Aug 28 2012, 06:30 PM fredk This is interesting. A suggestion: look at the ca... Aug 29 2012, 07:37 PM RoverDriver I don't know, but is it possible these images ... Aug 29 2012, 07:54 PM ugordan QUOTE (RoverDriver @ Aug 29 2012, 09:54 P... Aug 29 2012, 09:02 PM jmknapp Anyone know why the "full frame" raw MAS... Sep 8 2012, 12:12 AM Deimos QUOTE (jmknapp @ Sep 8 2012, 01:12 AM) An... Sep 8 2012, 12:49 AM jmknapp QUOTE (Deimos @ Sep 7 2012, 08:49 PM) But... Sep 8 2012, 01:37 AM iMPREPREX Hey folks. I see a lot of controversy here in rega... Sep 9 2012, 07:04 PM fredk QUOTE (iMPREPREX @ Sep 9 2012, 07:04 PM) ... Sep 9 2012, 07:33 PM iMPREPREX All I have is a pattern I can't get rid of. Wo... Sep 9 2012, 08:29 PM EdTruthan Here's a HUMONGOUS ANAGLYPH for anyone so incl... Sep 10 2012, 05:23 AM Nix woaw, very nice work.. Sep 10 2012, 05:32 PM fredk I second that. Very nicely done.
Let's hope ... Sep 10 2012, 05:47 PM EdTruthan QUOTE (fredk @ Sep 10 2012, 10:47 AM) Let... Sep 11 2012, 05:26 PM morganism The web interview with our camera operator !
... Sep 10 2012, 10:47 PM elakdawalla Oh my. I'm actually not bothered by the fuzzin... Sep 11 2012, 05:59 PM fredk Now that's being resourceful! Very cool. Sep 11 2012, 07:07 PM fredk And here's my attempt at combining sol13 mastc... Sep 11 2012, 08:04 PM EdTruthan Very Nice! I find it interesting to note how l... Sep 11 2012, 11:31 PM Eyesonmars I've been wondering if it is technically feasi... Sep 12 2012, 07:35 PM mcaplinger QUOTE (Eyesonmars @ Sep 12 2012, 12:35 PM... Sep 12 2012, 08:30 PM Eyesonmars Thanks mcaplinger for the response.
Perhaps I rea... Sep 12 2012, 09:08 PM fredk Maybe software could use sparsely timed images (li... Sep 12 2012, 09:10 PM mcaplinger QUOTE (fredk @ Sep 12 2012, 02:10 PM) May... Sep 12 2012, 09:22 PM Deimos QUOTE (fredk @ Sep 12 2012, 09:10 PM) It ... Sep 12 2012, 10:02 PM climber I must admit there's something I don't und... Sep 13 2012, 11:50 AM dvandorn QUOTE (climber @ Sep 13 2012, 06:50 AM) I... Sep 13 2012, 12:32 PM pospa QUOTE (climber @ Sep 13 2012, 01:50 PM) I... Sep 13 2012, 12:38 PM centsworth_II QUOTE (pospa @ Sep 13 2012, 07:38 AM) Thi... Sep 13 2012, 01:00 PM Tesheiner There were several posts about this topic on the l... Sep 13 2012, 12:50 PM climber Thank you ALL!
Believe me, I read ALL posts bu... Sep 13 2012, 01:52 PM fredk For the navcams, here's my guess. We've d... Sep 15 2012, 07:36 PM ugordan QUOTE (fredk @ Sep 15 2012, 09:36 PM) Or ... Sep 15 2012, 07:42 PM mcaplinger QUOTE (fredk @ Sep 15 2012, 12:36 PM) We... Sep 15 2012, 07:52 PM Eluchil When comparing the left and right Mastcams of the ... Sep 16 2012, 06:54 AM
Cargo Cult QUOTE (um3k @ Aug 18 2012, 07:00 AM) That... Aug 18 2012, 10:45 PM um3k QUOTE (Cargo Cult @ Aug 18 2012, 06:45 PM... Aug 18 2012, 10:50 PM ugordan QUOTE (um3k @ Aug 19 2012, 12:50 AM) It... Aug 18 2012, 11:04 PM um3k I suppose that sort of makes sense. It makes the p... Aug 18 2012, 11:16 PM mcaplinger QUOTE (um3k @ Aug 18 2012, 04:16 PM) I su... Aug 18 2012, 11:48 PM um3k I mean no offense, in fact I greatly admire you an... Aug 18 2012, 11:55 PM nprev Welcome, Winston, and thanks for a terrific first ... Aug 19 2012, 04:29 PM fredk Here's the FFT of the jpeged Bayer patterns, u... Aug 25 2012, 08:54 PM ngunn I'm totally fascinated by the various approach... Aug 25 2012, 09:35 PM Art Martin I hope this is the right section for this. I... Aug 26 2012, 04:25 PM ngunn QUOTE (Art Martin @ Aug 26 2012, 05:25 PM... Aug 26 2012, 05:09 PM john_s QUOTE (ngunn @ Aug 26 2012, 11:09 AM) It... Aug 26 2012, 05:55 PM Phil Stooke I don't do anaglyphs so I can't get techni... Aug 26 2012, 04:35 PM fredk I think what Art's suggesting is adjusting the... Aug 26 2012, 05:17 PM Art Martin Yes, that's exactly what I was wondering about... Aug 26 2012, 08:09 PM Pando Here's my attempt at creating a 3d anaglyph im... Aug 26 2012, 06:59 PM ngunn QUOTE (john_s @ Aug 26 2012, 06:55 PM) Ac... Aug 26 2012, 07:49 PM Roby72 A few remarks about the near focus of the mastcams... Aug 27 2012, 08:22 PM mcaplinger QUOTE (Roby72 @ Aug 27 2012, 01:22 PM) Di... Aug 27 2012, 08:55 PM PDP8E Back from a little vacation, and catching up on al... Aug 28 2012, 12:12 AM mcaplinger QUOTE (PDP8E @ Aug 27 2012, 05:12 PM) ...... Aug 28 2012, 12:49 AM ElkGroveDan Sounds like a great task for a trusted college int... Aug 28 2012, 04:06 AM mcaplinger QUOTE (ElkGroveDan @ Aug 27 2012, 09:06 P... Aug 28 2012, 04:44 AM ugordan QUOTE (mcaplinger @ Aug 28 2012, 06:44 AM... Aug 28 2012, 07:57 AM mcaplinger QUOTE (ugordan @ Aug 28 2012, 12:57 AM) w... Aug 28 2012, 02:03 PM JohnVV the jpg issue is mostly solved
http://imgbox.com/... Aug 28 2012, 07:30 AM ugordan QUOTE (JohnVV @ Aug 28 2012, 09:30 AM) th... Aug 28 2012, 07:59 AM RegiStax QUOTE (ugordan @ Aug 28 2012, 09:59 AM) J... Aug 28 2012, 09:40 AM jmknapp I wonder what the effective bits per pixel of the ... Aug 28 2012, 10:08 AM mcaplinger QUOTE (jmknapp @ Aug 28 2012, 03:08 AM) I... Aug 28 2012, 01:48 PM Airbag QUOTE (mcaplinger @ Aug 28 2012, 08:48 AM... Aug 28 2012, 02:39 PM jmknapp QUOTE (mcaplinger @ Aug 28 2012, 08:48 AM... Aug 28 2012, 07:47 PM mcaplinger QUOTE (jmknapp @ Aug 28 2012, 12:47 PM) W... Aug 28 2012, 08:25 PM jmknapp QUOTE (mcaplinger @ Aug 28 2012, 04:25 PM... Aug 29 2012, 12:32 AM Airbag That explains it all Joe - thanks! This made m... Aug 29 2012, 06:44 PM jmknapp QUOTE (Airbag @ Aug 29 2012, 02:44 PM) ..... Aug 29 2012, 07:01 PM Airbag Joe, I think you may have the wrong "law... Aug 29 2012, 07:29 PM mcaplinger QUOTE (Airbag @ Aug 29 2012, 11:44 AM) Th... Aug 29 2012, 07:48 PM Floyd mcaplinger We all really appreciate the fantastic... Aug 28 2012, 03:05 PM ugordan Airbag, also look up photon shot noise to see why ... Aug 28 2012, 03:09 PM Airbag Ugordan,
But photon shot noise is less of an issu... Aug 28 2012, 04:17 PM mcaplinger QUOTE (Airbag @ Aug 28 2012, 09:17 AM) Bu... Aug 28 2012, 04:22 PM Airbag I was looking at shot noise from a S/N point of vi... Aug 28 2012, 06:30 PM fredk This is interesting. A suggestion: look at the ca... Aug 29 2012, 07:37 PM RoverDriver I don't know, but is it possible these images ... Aug 29 2012, 07:54 PM ugordan QUOTE (RoverDriver @ Aug 29 2012, 09:54 P... Aug 29 2012, 09:02 PM jmknapp Anyone know why the "full frame" raw MAS... Sep 8 2012, 12:12 AM Deimos QUOTE (jmknapp @ Sep 8 2012, 01:12 AM) An... Sep 8 2012, 12:49 AM jmknapp QUOTE (Deimos @ Sep 7 2012, 08:49 PM) But... Sep 8 2012, 01:37 AM iMPREPREX Hey folks. I see a lot of controversy here in rega... Sep 9 2012, 07:04 PM fredk QUOTE (iMPREPREX @ Sep 9 2012, 07:04 PM) ... Sep 9 2012, 07:33 PM iMPREPREX All I have is a pattern I can't get rid of. Wo... Sep 9 2012, 08:29 PM EdTruthan Here's a HUMONGOUS ANAGLYPH for anyone so incl... Sep 10 2012, 05:23 AM Nix woaw, very nice work.. Sep 10 2012, 05:32 PM fredk I second that. Very nicely done.
Let's hope ... Sep 10 2012, 05:47 PM EdTruthan QUOTE (fredk @ Sep 10 2012, 10:47 AM) Let... Sep 11 2012, 05:26 PM morganism The web interview with our camera operator !
... Sep 10 2012, 10:47 PM elakdawalla Oh my. I'm actually not bothered by the fuzzin... Sep 11 2012, 05:59 PM fredk Now that's being resourceful! Very cool. Sep 11 2012, 07:07 PM fredk And here's my attempt at combining sol13 mastc... Sep 11 2012, 08:04 PM EdTruthan Very Nice! I find it interesting to note how l... Sep 11 2012, 11:31 PM Eyesonmars I've been wondering if it is technically feasi... Sep 12 2012, 07:35 PM mcaplinger QUOTE (Eyesonmars @ Sep 12 2012, 12:35 PM... Sep 12 2012, 08:30 PM Eyesonmars Thanks mcaplinger for the response.
Perhaps I rea... Sep 12 2012, 09:08 PM fredk Maybe software could use sparsely timed images (li... Sep 12 2012, 09:10 PM mcaplinger QUOTE (fredk @ Sep 12 2012, 02:10 PM) May... Sep 12 2012, 09:22 PM Deimos QUOTE (fredk @ Sep 12 2012, 09:10 PM) It ... Sep 12 2012, 10:02 PM climber I must admit there's something I don't und... Sep 13 2012, 11:50 AM dvandorn QUOTE (climber @ Sep 13 2012, 06:50 AM) I... Sep 13 2012, 12:32 PM pospa QUOTE (climber @ Sep 13 2012, 01:50 PM) I... Sep 13 2012, 12:38 PM centsworth_II QUOTE (pospa @ Sep 13 2012, 07:38 AM) Thi... Sep 13 2012, 01:00 PM Tesheiner There were several posts about this topic on the l... Sep 13 2012, 12:50 PM climber Thank you ALL!
Believe me, I read ALL posts bu... Sep 13 2012, 01:52 PM fredk For the navcams, here's my guess. We've d... Sep 15 2012, 07:36 PM ugordan QUOTE (fredk @ Sep 15 2012, 09:36 PM) Or ... Sep 15 2012, 07:42 PM mcaplinger QUOTE (fredk @ Sep 15 2012, 12:36 PM) We... Sep 15 2012, 07:52 PM Eluchil When comparing the left and right Mastcams of the ... Sep 16 2012, 06:54 AM |

|
Lo-Fi Version | Time is now: 23rd September 2024 - 11:45 AM |
|
RULES AND GUIDELINES Please read the Forum Rules and Guidelines before posting. IMAGE COPYRIGHT |
OPINIONS AND MODERATION Opinions expressed on UnmannedSpaceflight.com are those of the individual posters and do not necessarily reflect the opinions of UnmannedSpaceflight.com or The Planetary Society. The all-volunteer UnmannedSpaceflight.com moderation team is wholly independent of The Planetary Society. The Planetary Society has no influence over decisions made by the UnmannedSpaceflight.com moderators. |
SUPPORT THE FORUM Unmannedspaceflight.com is funded by the Planetary Society. Please consider supporting our work and many other projects by donating to the Society or becoming a member. |
|