ExoMars - Schiaparelli landing |

ExoMars - Schiaparelli landing |
 Aug 12 2016, 07:07 PM Aug 12 2016, 07:07 PM
Post
#1
|
||
|
Solar System Cartographer  Group: Members Posts: 10184 Joined: 5-April 05 From: Canada Member No.: 227 |
Starting a new topic here - hopefully that's OK! Clearly there will be a lot of action around this in the next weeks and months with descent images and HiRISE views of the hardware.
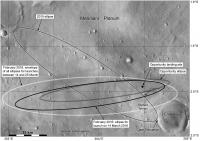
I thought I had posted this map earlier but apparently not. This shows the various landing ellipses in this area. The original plan was for an ellipse oriented NW-SE, but it changed with the different launch date and is now nearly E-W. Note that the ellipse shown in the recent ESA release is the envelope of all ellipses over a given launch period, but the actual landing ellipse for the given launch date is smaller. Opportunity's final landing ellipse is shown for comparison. http://exploration.esa.int/mars/57445-exom...6-landing-site/ http://exploration.esa.int/mars/57446-exom...6-landing-site/ Phil
-------------------- ... because the Solar System ain't gonna map itself.
Also to be found posting similar content on https://mastodon.social/@PhilStooke Maps for download (free PD: https://upload.wikimedia.org/wikipedia/comm...Cartography.pdf NOTE: everything created by me which I post on UMSF is considered to be in the public domain (NOT CC, public domain) |
|
 |
 
|
|
 |
|
Oct 25 2016, 06:51 AM
Post
#2
|
|
|
Member Group: Members Posts: 149 Joined: 18-June 08 Member No.: 4216 |
Reported in Anatoly Zak's website:
"By October 24, engineers narrowed down a possible culprit to an error in the software of the Schiaparelli's Doppler radar altimeter, which misled the main computer into thinking that the spacecraft had already reached the landing altitude." That sounds like something you should catch during testing on the ground (Earth ground, that is) |
|
|
|
|
Oct 25 2016, 02:00 PM
Post
#3
|
|
 Member Group: Members Posts: 916 Joined: 15-June 09 From: Lisbon, Portugal Member No.: 4824 |
QUOTE (tolis @ Oct 25 2016, 07:51 AM)  That sounds like something you should catch during testing I've been writing code since 1970 (when the world was "young and uncomplicated"  ), but I never dealt with real-time, or near-real-time handling code which, I suspect, Schiparelli must use, and imposes a lot of constraints on code, including path-length (the time available for a given algorithm to execute). ), but I never dealt with real-time, or near-real-time handling code which, I suspect, Schiparelli must use, and imposes a lot of constraints on code, including path-length (the time available for a given algorithm to execute).I red somewhere that it has been mathematically proved that, except for simple cases, it cannot be demonstrated that a program is 100% correct. So, given one has to live with errors, what can be done to minimize them? Software building, coding methodologies can be used. "Proven" code can be reused - as long as the context of the proof remains valid for the case at hand and people are aware of it. And, of course, testing. A lot of testing. Automated testing can catch some errors, and test cases are specifically created. Can one foresee everything? Every possible combination of inputs? Some errors are caught by sheer luck, others may remain hidden for a long time, until a rare set of conditions manifests itself. Every time an error is caught its correction is included in the next release of the software. It works for the relatively forgiving environments of every day life. Space is much, much more harsh. I'm just offering my own experience, not excusing anyone or anything. Sometimes, getting the kinks out of a program, feels harder than landing on Mars [pun intended]. Fernando |
|
|
|
|
Oct 25 2016, 04:58 PM
Post
#4
|
|
 Senior Member Group: Members Posts: 2530 Joined: 20-April 05 Member No.: 321 |
As a career software engineer, I doubt very much if either logical correctness or speed of execution are much of an issue here. The logic of the program is almost certainly a small matter compared to the complexity of the dynamic situation with multiple hardware systems operating in a complex and partly uncertain physical world. Even if a program were proven "correct," if that meant correct given that your radar behaved normally and during the actual landing, the radar experienced a glitch, then the correctness of the program could prove irrelevant.
The speed of modern microprocessors probably exceeds the requirements by more than one order of magnitude. My take, from the outside looking in, is how to make a system that can save the spacecraft if physical events and the performance of sensor hardware go a bit beyond expected limits. If they go radically outside of expected limits, then the software might not be the problem anyway. But if they go moderately beyond normal expectations, then an ideal system might save the spacecraft whereas a good one might not. I don't know which, if any, of those possibilities apply here. It seems, though, that telemetry took place past the point when things went wrong, so there's a good chance that we'll eventually know the root cause. |
|
|
|
 Phil Stooke ExoMars - Schiaparelli landing Aug 12 2016, 07:07 PM
Phil Stooke ExoMars - Schiaparelli landing Aug 12 2016, 07:07 PM nogal I had originally posted this information on anothe... Aug 19 2016, 06:23 PM sittingduck Will Opportunity be able to image the Schiaparelli... Aug 19 2016, 08:44 PM James Sorenson Opportunity is heading down deeper into Endeavour,... Aug 19 2016, 09:27 PM Explorer1 Even capturing one pixel would be a fantastic succ... Aug 20 2016, 02:40 AM Deimos The nominal trajectory has the entry phase and par... Aug 24 2016, 03:24 PM Ron Hobbs The ESA site is featuring images of the landing si... Aug 26 2016, 04:17 AM akuo I tried to look for information about coverage of ... Oct 13 2016, 05:16 PM Paolo I think you can find answers to most of your quest... Oct 13 2016, 06:00 PM Paolo yesterday ESA published two short articles on Schi... Oct 13 2016, 06:05 PM akuo Thanks Paolo, that's the info I need.
To summ... Oct 13 2016, 07:04 PM Phil Stooke http://www.midnightplanets.com/web/MERB/im...4P267... Oct 13 2016, 07:29 PM Deimos And context for that test image: http://www.leonar... Oct 13 2016, 07:43 PM akuo With Oppy being so close, was there any considerat... Oct 13 2016, 07:56 PM
nogal I had originally posted this information on anothe... Aug 19 2016, 06:23 PM sittingduck Will Opportunity be able to image the Schiaparelli... Aug 19 2016, 08:44 PM James Sorenson Opportunity is heading down deeper into Endeavour,... Aug 19 2016, 09:27 PM Explorer1 Even capturing one pixel would be a fantastic succ... Aug 20 2016, 02:40 AM Deimos The nominal trajectory has the entry phase and par... Aug 24 2016, 03:24 PM Ron Hobbs The ESA site is featuring images of the landing si... Aug 26 2016, 04:17 AM akuo I tried to look for information about coverage of ... Oct 13 2016, 05:16 PM Paolo I think you can find answers to most of your quest... Oct 13 2016, 06:00 PM Paolo yesterday ESA published two short articles on Schi... Oct 13 2016, 06:05 PM akuo Thanks Paolo, that's the info I need.
To summ... Oct 13 2016, 07:04 PM Phil Stooke http://www.midnightplanets.com/web/MERB/im...4P267... Oct 13 2016, 07:29 PM Deimos And context for that test image: http://www.leonar... Oct 13 2016, 07:43 PM akuo With Oppy being so close, was there any considerat... Oct 13 2016, 07:56 PM
 climber QUOTE (akuo @ Oct 13 2016, 09:56 PM) With... Oct 14 2016, 07:09 AM akuo QUOTE (climber @ Oct 14 2016, 10:09 AM) L... Oct 14 2016, 09:13 AM climber Can somebody point out Victoria crater? Oct 14 2016, 07:03 AM centsworth_II QUOTE (climber @ Oct 14 2016, 02:03 AM) C... Oct 14 2016, 07:19 AM climber Oh yes, sorry about that.
If I remembrer correctel... Oct 14 2016, 07:35 AM katodomo QUOTE (climber @ Oct 14 2016, 09:35 AM) I... Oct 14 2016, 07:01 PM climber This was just for Schiaparelli = Channels, oh well... Oct 14 2016, 09:26 AM Explorer1 Schiaparelli seperation confirmed! Oct 16 2016, 05:35 PM nogal Here is a link to a page where live updates about ... Oct 16 2016, 07:50 PM Hungry4info ESA's official twitter confirms TGO is now ret... Oct 16 2016, 09:08 PM nogal A few ESA links about Schiaparelli's EDL:
Sch... Oct 17 2016, 11:59 PM nogal ExoMars TGO burning proceding ok, "with sligh... Oct 19 2016, 03:20 PM xflare Following Tweets from ESA, it seems they were abl... Oct 19 2016, 03:25 PM akuo No exact timing mentioned but the Puna radiotelesc... Oct 19 2016, 03:28 PM xflare Mars Express transmitting EDL data now. Oct 19 2016, 03:49 PM Art Martin I have a question about this lander mission for th... Oct 19 2016, 04:06 PM nogal ExoMars TGO is now confirmed to be in martian orbi... Oct 19 2016, 04:46 PM PaulM QUOTE (Art Martin @ Oct 19 2016, 05:06 PM... Oct 19 2016, 05:35 PM mcaplinger QUOTE (PaulM @ Oct 19 2016, 09:35 AM) Ent... Oct 19 2016, 05:49 PM mcaplinger QUOTE (PaulM @ Oct 19 2016, 09:35 AM) I h... Oct 20 2016, 03:13 AM PaulM QUOTE (mcaplinger @ Oct 20 2016, 04:13 AM... Oct 20 2016, 12:24 PM climber Does somebody know when Oppy's images attempt ... Oct 19 2016, 04:32 PM xflare Looks like the Orbiter burn was successful - signa... Oct 19 2016, 04:44 PM Explorer1 Oppy's image attempt should come this afternoo... Oct 19 2016, 05:08 PM xflare According to BBCs Jonathon Amos Mars Express saw p... Oct 19 2016, 06:07 PM B Bernatchez When might we get HiRise coverage of the landing z... Oct 19 2016, 08:16 PM Phil Stooke Have to figure out where it is first. Tracking mi... Oct 19 2016, 09:52 PM James Sorenson There are two candidates that I spot in the Oppy i... Oct 19 2016, 10:03 PM Steve5304 QUOTE (James Sorenson @ Oct 19 2016, 11:0... Oct 19 2016, 10:36 PM fredk QUOTE (Steve5304 @ Oct 19 2016, 11:36 PM)... Oct 20 2016, 12:32 AM marsophile QUOTE (fredk @ Oct 19 2016, 04:32 PM) ...... Oct 23 2016, 05:49 AM James Sorenson When pancam auto-exposes images through each filt... Oct 23 2016, 06:35 PM Explorer1 Flipping between the two links James posted I see ... Oct 19 2016, 10:50 PM tanjent Based on the shape of the landing ellipse relative... Oct 19 2016, 11:23 PM TheAnt The second image, at top right, look a bit like a ... Oct 20 2016, 12:29 AM nprev Had to work all day so just catching up.
Let... Oct 20 2016, 01:48 AM JRehling I've seen a spacecraft re-enter (Stardust) fro... Oct 20 2016, 02:27 AM JRehling QUOTE (nprev @ Oct 19 2016, 06:48 PM) Mar... Oct 20 2016, 03:24 AM xflare I followed the edl on twitter, they got so close I... Oct 20 2016, 06:44 AM Explorer1 Staying up late for the conference; looks like all... Oct 20 2016, 08:25 AM Gerald QUOTE (Explorer1 @ Oct 20 2016, 10:25 AM)... Oct 20 2016, 03:27 PM xflare QUOTE (Gerald @ Oct 20 2016, 04:27 PM) Ei... Oct 20 2016, 03:41 PM xflare Arggh stream kept buffering so missed quite a bit,... Oct 20 2016, 08:47 AM abalone "Schiaparelli Mars probe's parachute ... Oct 20 2016, 09:44 AM climber QUOTE (abalone @ Oct 20 2016, 11:44 AM) ... Oct 20 2016, 10:01 AM alphasam QUOTE (climber @ Oct 20 2016, 11:01 AM) S... Oct 20 2016, 11:19 AM climber To me this si more than a partial succes since all... Oct 20 2016, 09:57 AM tolis I think that it is a mistake that they tried to av... Oct 20 2016, 11:54 AM craigmcg Its always good to be patient in these situations,... Oct 20 2016, 02:43 PM climber Let see if it enters the category of multiple land... Oct 20 2016, 07:37 PM katodomo Question: Schiaparelli carried INRRI, a laser retr... Oct 20 2016, 07:38 PM Phil Stooke Not sure, but they would take that into account in... Oct 20 2016, 07:44 PM nprev MOD NOTE: Two posts set invisible for inciting (an... Oct 21 2016, 12:03 AM alan QUOTE ESA promised to continue attempts to communi... Oct 21 2016, 03:20 PM tedstryk It appears that they may recover the data from AME... Oct 21 2016, 03:30 PM xflare QUOTE (alan @ Oct 21 2016, 04:20 PM) http... Oct 21 2016, 03:51 PM Explorer1 Yes, its a CTX image; low res, but that settles it... Oct 21 2016, 05:15 PM JRehling This is an extreme "cup half full" inter... Oct 21 2016, 05:45 PM nogal There were repeated remarks that the landing would... Oct 21 2016, 05:53 PM Habukaz QUOTE (nogal @ Oct 21 2016, 07:53 PM) The... Oct 21 2016, 06:28 PM fredk QUOTE (nogal @ Oct 21 2016, 06:53 PM) So ... Oct 21 2016, 06:52 PM Explorer1 Yes, that's a good point JHReling. I seem to r... Oct 21 2016, 05:57 PM alan 53 km's from Oppy, I bet she could reach it. Oct 21 2016, 06:29 PM neo56 I looked at Oppy's new images on Midnight Plan... Oct 21 2016, 07:25 PM Explorer1 We know from the CTX images that it landed near th... Oct 21 2016, 07:30 PM fredk On top of that, with the landing site over 50 km f... Oct 21 2016, 07:43 PM fredk I see a couple of possibly interesting features on... Oct 21 2016, 08:39 PM tolis QUOTE (fredk @ Oct 21 2016, 09:39 PM) I s... Oct 21 2016, 09:49 PM mcaplinger These images were likely not autoexposed, but you... Oct 23 2016, 08:23 PM nogal A minuscule tribute to the ExoMars team. I have up... Oct 23 2016, 08:26 PM marsophile One way to rule out the streak in
http://qt.explo... Oct 24 2016, 01:20 AM mcaplinger The time in the file name is an SCLK value and dri... Oct 24 2016, 03:32 AM Deimos The images were taken with fixed exposure times to... Oct 24 2016, 05:19 PM vikingmars QUOTE (tolis @ Oct 25 2016, 08:51 AM) Rep... Oct 25 2016, 09:57 AM tolis QUOTE (vikingmars @ Oct 25 2016, 10:57 AM... Oct 25 2016, 10:52 AM mcaplinger QUOTE (JRehling @ Oct 25 2016, 08:58 AM) ... Oct 25 2016, 06:49 PM Decepticon RE: ExoMars - Schiaparelli landing Oct 25 2016, 08:40 AM Art Martin That would be mind blowing if the sequences of lan... Oct 25 2016, 01:53 PM Habukaz According to this audio (transcript) from Deutschl... Oct 25 2016, 03:04 PM katodomo The transcript link above also links:
the EDM mis... Oct 25 2016, 03:37 PM PDP8E I would like to know if ESA released a test articl... Oct 25 2016, 05:08 PM Explorer1 English language article saying main hunch is a co... Oct 25 2016, 08:12 PM siravan One of the difficulties of landing on Mars (among ... Oct 25 2016, 08:12 PM
climber QUOTE (akuo @ Oct 13 2016, 09:56 PM) With... Oct 14 2016, 07:09 AM akuo QUOTE (climber @ Oct 14 2016, 10:09 AM) L... Oct 14 2016, 09:13 AM climber Can somebody point out Victoria crater? Oct 14 2016, 07:03 AM centsworth_II QUOTE (climber @ Oct 14 2016, 02:03 AM) C... Oct 14 2016, 07:19 AM climber Oh yes, sorry about that.
If I remembrer correctel... Oct 14 2016, 07:35 AM katodomo QUOTE (climber @ Oct 14 2016, 09:35 AM) I... Oct 14 2016, 07:01 PM climber This was just for Schiaparelli = Channels, oh well... Oct 14 2016, 09:26 AM Explorer1 Schiaparelli seperation confirmed! Oct 16 2016, 05:35 PM nogal Here is a link to a page where live updates about ... Oct 16 2016, 07:50 PM Hungry4info ESA's official twitter confirms TGO is now ret... Oct 16 2016, 09:08 PM nogal A few ESA links about Schiaparelli's EDL:
Sch... Oct 17 2016, 11:59 PM nogal ExoMars TGO burning proceding ok, "with sligh... Oct 19 2016, 03:20 PM xflare Following Tweets from ESA, it seems they were abl... Oct 19 2016, 03:25 PM akuo No exact timing mentioned but the Puna radiotelesc... Oct 19 2016, 03:28 PM xflare Mars Express transmitting EDL data now. Oct 19 2016, 03:49 PM Art Martin I have a question about this lander mission for th... Oct 19 2016, 04:06 PM nogal ExoMars TGO is now confirmed to be in martian orbi... Oct 19 2016, 04:46 PM PaulM QUOTE (Art Martin @ Oct 19 2016, 05:06 PM... Oct 19 2016, 05:35 PM mcaplinger QUOTE (PaulM @ Oct 19 2016, 09:35 AM) Ent... Oct 19 2016, 05:49 PM mcaplinger QUOTE (PaulM @ Oct 19 2016, 09:35 AM) I h... Oct 20 2016, 03:13 AM PaulM QUOTE (mcaplinger @ Oct 20 2016, 04:13 AM... Oct 20 2016, 12:24 PM climber Does somebody know when Oppy's images attempt ... Oct 19 2016, 04:32 PM xflare Looks like the Orbiter burn was successful - signa... Oct 19 2016, 04:44 PM Explorer1 Oppy's image attempt should come this afternoo... Oct 19 2016, 05:08 PM xflare According to BBCs Jonathon Amos Mars Express saw p... Oct 19 2016, 06:07 PM B Bernatchez When might we get HiRise coverage of the landing z... Oct 19 2016, 08:16 PM Phil Stooke Have to figure out where it is first. Tracking mi... Oct 19 2016, 09:52 PM James Sorenson There are two candidates that I spot in the Oppy i... Oct 19 2016, 10:03 PM Steve5304 QUOTE (James Sorenson @ Oct 19 2016, 11:0... Oct 19 2016, 10:36 PM fredk QUOTE (Steve5304 @ Oct 19 2016, 11:36 PM)... Oct 20 2016, 12:32 AM marsophile QUOTE (fredk @ Oct 19 2016, 04:32 PM) ...... Oct 23 2016, 05:49 AM James Sorenson When pancam auto-exposes images through each filt... Oct 23 2016, 06:35 PM Explorer1 Flipping between the two links James posted I see ... Oct 19 2016, 10:50 PM tanjent Based on the shape of the landing ellipse relative... Oct 19 2016, 11:23 PM TheAnt The second image, at top right, look a bit like a ... Oct 20 2016, 12:29 AM nprev Had to work all day so just catching up.
Let... Oct 20 2016, 01:48 AM JRehling I've seen a spacecraft re-enter (Stardust) fro... Oct 20 2016, 02:27 AM JRehling QUOTE (nprev @ Oct 19 2016, 06:48 PM) Mar... Oct 20 2016, 03:24 AM xflare I followed the edl on twitter, they got so close I... Oct 20 2016, 06:44 AM Explorer1 Staying up late for the conference; looks like all... Oct 20 2016, 08:25 AM Gerald QUOTE (Explorer1 @ Oct 20 2016, 10:25 AM)... Oct 20 2016, 03:27 PM xflare QUOTE (Gerald @ Oct 20 2016, 04:27 PM) Ei... Oct 20 2016, 03:41 PM xflare Arggh stream kept buffering so missed quite a bit,... Oct 20 2016, 08:47 AM abalone "Schiaparelli Mars probe's parachute ... Oct 20 2016, 09:44 AM climber QUOTE (abalone @ Oct 20 2016, 11:44 AM) ... Oct 20 2016, 10:01 AM alphasam QUOTE (climber @ Oct 20 2016, 11:01 AM) S... Oct 20 2016, 11:19 AM climber To me this si more than a partial succes since all... Oct 20 2016, 09:57 AM tolis I think that it is a mistake that they tried to av... Oct 20 2016, 11:54 AM craigmcg Its always good to be patient in these situations,... Oct 20 2016, 02:43 PM climber Let see if it enters the category of multiple land... Oct 20 2016, 07:37 PM katodomo Question: Schiaparelli carried INRRI, a laser retr... Oct 20 2016, 07:38 PM Phil Stooke Not sure, but they would take that into account in... Oct 20 2016, 07:44 PM nprev MOD NOTE: Two posts set invisible for inciting (an... Oct 21 2016, 12:03 AM alan QUOTE ESA promised to continue attempts to communi... Oct 21 2016, 03:20 PM tedstryk It appears that they may recover the data from AME... Oct 21 2016, 03:30 PM xflare QUOTE (alan @ Oct 21 2016, 04:20 PM) http... Oct 21 2016, 03:51 PM Explorer1 Yes, its a CTX image; low res, but that settles it... Oct 21 2016, 05:15 PM JRehling This is an extreme "cup half full" inter... Oct 21 2016, 05:45 PM nogal There were repeated remarks that the landing would... Oct 21 2016, 05:53 PM Habukaz QUOTE (nogal @ Oct 21 2016, 07:53 PM) The... Oct 21 2016, 06:28 PM fredk QUOTE (nogal @ Oct 21 2016, 06:53 PM) So ... Oct 21 2016, 06:52 PM Explorer1 Yes, that's a good point JHReling. I seem to r... Oct 21 2016, 05:57 PM alan 53 km's from Oppy, I bet she could reach it. Oct 21 2016, 06:29 PM neo56 I looked at Oppy's new images on Midnight Plan... Oct 21 2016, 07:25 PM Explorer1 We know from the CTX images that it landed near th... Oct 21 2016, 07:30 PM fredk On top of that, with the landing site over 50 km f... Oct 21 2016, 07:43 PM fredk I see a couple of possibly interesting features on... Oct 21 2016, 08:39 PM tolis QUOTE (fredk @ Oct 21 2016, 09:39 PM) I s... Oct 21 2016, 09:49 PM mcaplinger These images were likely not autoexposed, but you... Oct 23 2016, 08:23 PM nogal A minuscule tribute to the ExoMars team. I have up... Oct 23 2016, 08:26 PM marsophile One way to rule out the streak in
http://qt.explo... Oct 24 2016, 01:20 AM mcaplinger The time in the file name is an SCLK value and dri... Oct 24 2016, 03:32 AM Deimos The images were taken with fixed exposure times to... Oct 24 2016, 05:19 PM vikingmars QUOTE (tolis @ Oct 25 2016, 08:51 AM) Rep... Oct 25 2016, 09:57 AM tolis QUOTE (vikingmars @ Oct 25 2016, 10:57 AM... Oct 25 2016, 10:52 AM mcaplinger QUOTE (JRehling @ Oct 25 2016, 08:58 AM) ... Oct 25 2016, 06:49 PM Decepticon RE: ExoMars - Schiaparelli landing Oct 25 2016, 08:40 AM Art Martin That would be mind blowing if the sequences of lan... Oct 25 2016, 01:53 PM Habukaz According to this audio (transcript) from Deutschl... Oct 25 2016, 03:04 PM katodomo The transcript link above also links:
the EDM mis... Oct 25 2016, 03:37 PM PDP8E I would like to know if ESA released a test articl... Oct 25 2016, 05:08 PM Explorer1 English language article saying main hunch is a co... Oct 25 2016, 08:12 PM siravan One of the difficulties of landing on Mars (among ... Oct 25 2016, 08:12 PM |

|
Lo-Fi Version | Time is now: 5th June 2024 - 02:14 AM |
|
RULES AND GUIDELINES Please read the Forum Rules and Guidelines before posting. IMAGE COPYRIGHT |
OPINIONS AND MODERATION Opinions expressed on UnmannedSpaceflight.com are those of the individual posters and do not necessarily reflect the opinions of UnmannedSpaceflight.com or The Planetary Society. The all-volunteer UnmannedSpaceflight.com moderation team is wholly independent of The Planetary Society. The Planetary Society has no influence over decisions made by the UnmannedSpaceflight.com moderators. |
SUPPORT THE FORUM Unmannedspaceflight.com is funded by the Planetary Society. Please consider supporting our work and many other projects by donating to the Society or becoming a member. |
|