Chang'e 3 prelaunch through lunar orbit insertion, Lander instruments, capability, development, testing, launch |

  |
Chang'e 3 prelaunch through lunar orbit insertion, Lander instruments, capability, development, testing, launch |
 Dec 6 2013, 10:55 AM Dec 6 2013, 10:55 AM
Post
#121
|
|
 Senior Member  Group: Admin Posts: 3108 Joined: 21-December 05 From: Canberra, Australia Member No.: 615 |
ESA Operations' twitter reports:
@esaoperations: #China's #ChangE3 entered lunar orbit ~10:53 CET acc to @XHNews state news agency. Congrats also from ESA OPS! BEIJING, Dec. 6 (Xinhua) -- China's Chang'e-3 probe entered the circular lunar orbit at 5:53 p.m. Friday Beijing Time, after about 112 hours of flying along Earth-Moon transfer orbit, the Beijing Aeropspace Control Center (BACC) said. |
 |
 
|
|
Dec 6 2013, 01:14 PM
Post
#122
|
|
 Member Group: Members Posts: 648 Joined: 9-May 05 From: Subotica Member No.: 384 |
I just found this SPECIAL PAGE for Chang'e lunar mission on CCTV.com.
Here is direct link: http://english.cntv.cn/special/lunarmission/index.shtml There are some really fine details about this mission in following three animations: http://english.cntv.cn/program/newsupdate/...02/102122.shtml http://english.cntv.cn/program/newsupdate/...02/100123.shtml http://english.cntv.cn/program/newsupdate/...02/100102.shtml -------------------- The scientist does not study nature because it is useful; he studies it because he delights in it, and he delights in it because it is beautiful.
Jules H. Poincare My "Astrophotos" gallery on flickr... |
|
|
|
|
Dec 7 2013, 06:41 AM
Post
#123
|
|
|
Junior Member Group: Members Posts: 68 Joined: 15-June 12 From: Hong Kong Member No.: 6419 |
I have just found some good introduction materials for all the 8 science instruments on the lander and rover (4 on each)! (source) Here are the details of each of them (translated by myself - please point out if I have mis-translated something as I am not well-versed with geology and chemistry instruments):
Lander instruments MastCam Objectives: Acquisition of landing area optical photographs for surveying the terrain and geological features of the landing zone. Position: On top of the mast of the lander Features: * Acquisition of landing zone photographs * Monitor the movement of rover on the lunar surface * With multi-color imaging ability * Can shoot both photographs and videos * Can tweak focusing automatically * With ability to minimize scattered lights and image compression Major sub-systems: Optical system, Mechanical system Operator: Institute of Optics and Electronics (IOE), Chinese Academy of Sciences (CAS)  Descent Camera Objectives: Acquisition of landing area optical photographs for surveying the terrain and geological features of the landing zone at altitudes between 2-4 km. Position: At the bottom of the lander Features: * Highly miniaturized design; light weight, small volume, low energy consumption, high performance * Can withstand high levels of radiation, temperature difference and violent vibrations at launch * CMOS sensor used * High-speed static grey-scale image compression used * Has automatic focusing Major sub-systems: Optical system, Imagery receiving and processing electric box Operator: Beijing Institute of Space Machinery and Electricity (BISME), China Academy of Space Technology (CAST)  Lunar-based Ultraviolet Telescope (LUT) Objectives: Making use of the absence of atmosphere and slow rotation of the Moon to observe selected variable celestial objects and sky areas in the near ultraviolet region. Position: -Y side of the lander Features: * First ever astronomical observation made from surface of other planetary objects for prolonged periods * Highly automated; can aim and point to various targets with the telescope mount automatically * Light weight achieved via using composite materials and structure optimization * Highly adaptable to the lunar surface environment; can operate between -20 and 40 degrees Celsius Major sub-systems: Telescope body and frame (left); reflector lens and telescope mount (right), electric cable mount and control systems Operator: National Astronomy Observatory of China (NAOC), CAS  Extreme Ultraviolet Imager (EUV) Objectives: Imagery of the Earth's ionosphere in the extreme ultraviolet region; investigations into space weather forecasting and ionosphere studies Position: Top side of the lander Features: * Can track Earth automatically; will perform long term imagery monitoring of scattered extreme ultraviolet radiation from the Earth's ionosphere * Operational wavelength is 30.4 nm (about 1/20 of visible light) * FOV 15 degrees (region covers about 7.5 Earths) * Can operate between -25 and 75 degrees Celsius; has ability to survive and operate in the highly variable thermal environment of the lunar surface * First extreme ultraviolet camera operating from the lunar surface Major sub-systems: Extreme ultraviolet multi-membrane optical imagery system; Extreme ultraviolet photon counter sensor; Signal processing unit; Pointing control system; Main control unit Operator: Changchun Institute of Optics, Fine Mechanics and Physics (CIOMP), CAS  Rover instruments PanCam Objectives: Acquire 3-D imagery of the lunar surface for surveying the terrain, geological features and structures, and craters inside the target region. Also monitors the operational state of the lander. Position: Top of the mast of the rover Features: * Uses simplified optical system and highly miniaturized design, making the cameras light-weight, small volume, low energy consuming and highly reliable * Can operate between -25 and 55 degrees Celsius and able to survive between -40 and 75 degrees Celsius * Focusing operational between 3m and infinity * Have both automatic and manual focusing; can automatically adjust the field brightness Major sub-systems: Twin PanCams (A &  , each with one optical system, mechanical system, electronics and thermal control parts , each with one optical system, mechanical system, electronics and thermal control partsOperator: Xian Institute of Optics and Precision Mechanics (OPT), CAS  Ground Penetration Radar (GPM) Objectives: Measure lunar soil depth and structural distribution of soil, magma, lava tubes and sub-surface rock layers Position: Inside the rover Features: * Channel I operates at 60MHz - for probing sub-surface geological features down to meter-level resolution; maximum depth >100 m * Channel II operates at 500MHz - for probing lunar soil depth with resolution better than 30 cm; maximum depth >30 m * The antennas can survive temperatures of -200 to 120 degrees Celsius * Miniaturized design, low energy consumption, high performance (the pictures on the left side are the results of testing the two radar channels at the Laohugou #12 glacier in Gansu province) Major sub-systems: Radar controller, channel I/II antennas and transmitter, electric cables etc. (right side from top to bottom: channel I transmitter, channel II transmitter, channel II antenna, channel I antenna) Operator: Institute of Electronics, CAS  VIS/NIR Imaging Spectrometer (VNIS) Objectives: Measure the composition and resources of the lunar surface via imaging and spectrometry in the visible and near-infrared wavelengths Position: Beneath the rover's top deck Features: * Utilizes RF-driven tunable light & ultrasound spectrometry * Utilizes new design ultrasound generators * Have anti-dust accumulation and in-orbit calibration functions * Miniaturized design, light weight, high performance (photos on the right are the sample spectra and photos of Labradorite simulated moon soil, quartz crystals and LLB simulated moon soil) Major sub-systems: Tunable light & ultrasound spectrometer optical system, ultrasound-driven target guiding, dust repelling and thermal control components, composite outer case, main control system and data processing module Operator: Shanghai Institute of Technical Physics (SITP), CAS  Alpha Particle X-Ray Spectrometer (APXS) Objectives: Measure the composition and distribution of various elements on the lunar surface via observing the scattered X-rays from the bombardment of alpha particles of rocks Position: On the rover's robotic arm Features: * Includes active particle scattering, in-situ determination of lunar surface element, in-orbit calibration and distance measurement functions * The sensor can re-calibrate itself through the use of standard calibration targets * Rover's lunar night survival contains a radioisotope heater unit (RHU) for keeping the sensor warm * Low energy consumption, light weight, high resolution and high sensitivity semi-conductor sensor used Major sub-systems: (from left to right) sensor, RHU, calibration target Operator: Institute of High Energy Physics (IHEP), CAS 
-------------------- UMSF - the place of Opportunity to satisfy your Spirit of Curiosity via Perseverance
|
|
|
|
|
Dec 7 2013, 08:48 AM
Post
#124
|
|
 Member Group: Members Posts: 555 Joined: 1-May 06 From: Scotland (Ecosse, Escocia) Member No.: 759 |
Thanks a lot, Cosmic Penguin. It's great to have your linguistic ability at our service.
The Rover Pancam temperature ranges are not encouraging, unless the camera is augmented by heaters, because the normal lunar temperature range is much wider than this. "...Can operate between -25 and 55 degrees Celsius and able to survive between -40 and 75 degrees Celsius." |
|
|
|
|
Dec 7 2013, 11:49 AM
Post
#125
|
|
|
Junior Member Group: Members Posts: 62 Joined: 11-July 11 Member No.: 6058 |
I see it in the original, too. That can't be right. Surely such an elementary error would be noticed. Perhaps, as you say, heaters will be used to protect the instruments.
|
|
|
|
|
Dec 7 2013, 04:23 PM
Post
#126
|
|
|
Member Group: Members Posts: 241 Joined: 28-October 12 Member No.: 6732 |
What about the very low frequency radio astronomy experiment? It is still mentioned in the 4M-S3 symposium abstracts.
|
|
|
|
|
Dec 7 2013, 04:30 PM
Post
#127
|
|
|
Merciless Robot Group: Admin Posts: 8784 Joined: 8-December 05 From: Los Angeles Member No.: 602 |
Thanks for all this terrific information, Cosmic Penguin. This will be VERY helpful!
 -------------------- A few will take this knowledge and use this power of a dream realized as a force for change, an impetus for further discovery to make less ancient dreams real.
|
|
|
|
|
Dec 8 2013, 01:40 AM
Post
#128
|
|
|
Solar System Cartographer Group: Members Posts: 10184 Joined: 5-April 05 From: Canada Member No.: 227 |
Not certain about this yet, but I have formed the impression that the rover camera mast folds down into the body at night and is covered by the solar panels, so it is protected in the warmer box.
Phil -------------------- ... because the Solar System ain't gonna map itself.
Also to be found posting similar content on https://mastodon.social/@PhilStooke Maps for download (free PD: https://upload.wikimedia.org/wikipedia/comm...Cartography.pdf NOTE: everything created by me which I post on UMSF is considered to be in the public domain (NOT CC, public domain) |
|
|
|
|
Dec 8 2013, 07:03 AM
Post
#129
|
|
 Senior Member Group: Members Posts: 2492 Joined: 15-January 05 From: center Italy Member No.: 150 |
A question arise, will the rover survive to the night temperature after first 14 days mission?
Added: I found this answer in this article QUOTE The rover is expected to survive three months in the harsh environment on the lunar surface three lunar days and three lunar nights This is accomplished through several small radioisotope thermal units on board; however, they probably meant that the rover will survive 3 lunar days and only two lunar nights...
-------------------- I always think before posting! - Marco -
|
|
|
|
|
Dec 13 2013, 06:19 PM
Post
#130
|
|
|
Solar System Cartographer Group: Members Posts: 10184 Joined: 5-April 05 From: Canada Member No.: 227 |
The two hour time difference is one orbit - they are landing one orbit earlier. That might reflect actual vs predicted orbit plane orientation, or the selection of a different landing ellipse. We still don't know much about specific landing sites and there could have been several candidates in the whole landing region. One would be chosen as the nominal target with a final decision pending arrival in lunar orbit.
Phil -------------------- ... because the Solar System ain't gonna map itself.
Also to be found posting similar content on https://mastodon.social/@PhilStooke Maps for download (free PD: https://upload.wikimedia.org/wikipedia/comm...Cartography.pdf NOTE: everything created by me which I post on UMSF is considered to be in the public domain (NOT CC, public domain) |
|
|
|
|
Dec 13 2013, 07:54 PM
Post
#131
|
|||
|
Junior Member Group: Members Posts: 68 Joined: 15-June 12 From: Hong Kong Member No.: 6419 |
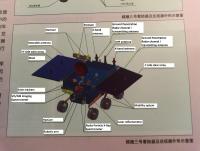
The best annotated diagram of the lander and rover I have seen so far...
 (source) ADMIN EDIT: Please do not post links to large in-line images. Save to your computer and upload as attachments (below).
Attached thumbnail(s)
-------------------- UMSF - the place of Opportunity to satisfy your Spirit of Curiosity via Perseverance
|
||
|
|
|
||
|
Dec 13 2013, 08:30 PM
Post
#132
|
|
|
Member Group: Members Posts: 279 Joined: 19-August 07 Member No.: 3299 |
Thanks Cosmic Penguin for posting a blog's link which has good discussions and details about Change-e'3. It is written in Chinese and I advise you use last version of Google Web Chrome which allows you to translate whole page from Chinese to English automatically.
|
|
|
|
|
Dec 13 2013, 10:38 PM
Post
#133
|
|||
|
Senior Member Group: Members Posts: 2492 Joined: 15-January 05 From: center Italy Member No.: 150 |
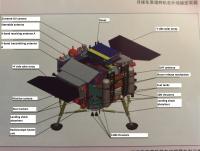
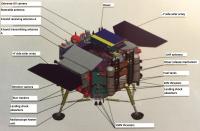
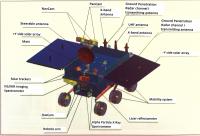
QUOTE (Cosmic Penguin @ Dec 13 2013, 08:54 PM)  The best annotated diagram of the lander and rover I have seen so far... Thanks! I made these improved versions:
-------------------- I always think before posting! - Marco -
|
||
|
|
|
||
|
Dec 14 2013, 12:14 AM
Post
#134
|
|
|
Senior Member Group: Members Posts: 2089 Joined: 13-February 10 From: Ontario Member No.: 5221 |
Those look great dilo!
t-12 hours until the Moon gets a new visitor, after such a long time... |
|
|
|
|

|
Lo-Fi Version | Time is now: 5th June 2024 - 02:11 AM |
|
RULES AND GUIDELINES Please read the Forum Rules and Guidelines before posting. IMAGE COPYRIGHT |
OPINIONS AND MODERATION Opinions expressed on UnmannedSpaceflight.com are those of the individual posters and do not necessarily reflect the opinions of UnmannedSpaceflight.com or The Planetary Society. The all-volunteer UnmannedSpaceflight.com moderation team is wholly independent of The Planetary Society. The Planetary Society has no influence over decisions made by the UnmannedSpaceflight.com moderators. |
SUPPORT THE FORUM Unmannedspaceflight.com is funded by the Planetary Society. Please consider supporting our work and many other projects by donating to the Society or becoming a member. |
|