Printable Version of Topic
Click here to view this topic in its original format
Unmanned Spaceflight.com _ Hayabusa2 _ Hayabusa2 MINERVA-II-1 operation
Posted by: charborob Sep 20 2018, 11:13 AM
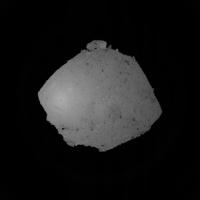
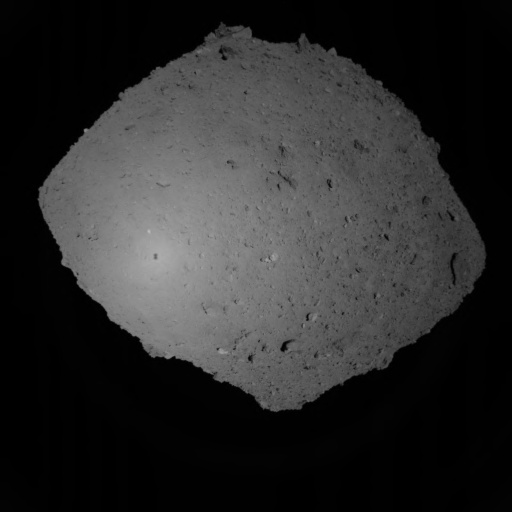
Hayabusa 2 has started its descent towards Ryugu for Minerva deployment. Real time navigation images are posted http://www.hayabusa2.jaxa.jp/en/galleries/onc/nav20180920/. One new image every half hour or so.
Posted by: mcmcmc Sep 20 2018, 12:35 PM
Operations schedule in GMT:
05:10 - Start descent from 20 km Done 05:08, Confirmed 05:26
11:00 - 13 km from Center Of Gravity of Ryugu CdG
15:30 - 5 km from CoG, deceleration from 0.40 to 0.10 m/s (from 1.44 km/h to 0.36 km/h)
18:30 - 4 km from CoG
21 september
00:00 - 2 km from CoG
00:10 - Altitude 1500 meters above surface
03:00 - Altitude 500 meters above surface
03:40 - Altitude 250 meters above surface
04:00-04:30 - Altitude 60 meters - Rover deployment, H2 raises again
Rovers diameter: 18 cm; 60 m away they will be 30 pixel wide in ONC-T, 3 pixel in ONC-W1.
http://www.hayabusa2.jaxa.jp/en/topics/20180920e/
Posted by: Hungry4info Sep 21 2018, 02:43 AM
After about 2 hours of no new images, the real-time image page is updating again. We can definitely see the spacecraft's shadow now. This image received at 2018 Sep 21 02:10 UTC.
|
Posted by: Hungry4info Sep 21 2018, 04:21 AM
Cruising over the surface of Ryugu. 2018 Sep 21, 04:09 UTC. MINERVA-II1 deploy should be any minute now, if it hasn't already happened.

|
Posted by: Hungry4info Sep 21 2018, 05:00 AM
MINERVA-II1 has separated!
Posted by: dvandorn Sep 21 2018, 05:17 AM
Here is the image posted, taken from the JAXA web page, at 4:19 UTC. Likely taken as much as 30 to 40 minutes prior to Minerva release.
|
Posted by: Hungry4info Sep 21 2018, 05:37 AM
Contexts of the latest two images as of the time of this post.
|
|
Posted by: mcmcmc Sep 21 2018, 12:10 PM
Gyroscope issues detected, but not relevant because rovers can communicate in any orientation.
Sunrise should be around 10:00 UTC, but when sun will actually hit panels depends on terrain.
Telemetries reveal at least one picture has been taken but not yet transmitted.
Data rate is 32 kbps.
Twitter feeds with comments about the just finished press conference:
https://twitter.com/ShinyaMatsuura
https://twitter.com/moffmiyazaki
Press release in Japanese:
http://fanfun.jaxa.jp/jaxatv/files/20180921_minerva2.pdf
Today press conference:
https://www.youtube.com/watch?v=MrwMFbzl-Fs
Posted by: mcmcmc Sep 21 2018, 12:38 PM
Sunrise over rovers should have happened since a couple of hours now, but who knows where they are w.r.t H2?
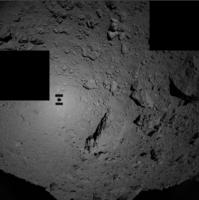
Deployment happened at 04:35 UTC, which means 16 minutes after this image was taken:
http://www.hayabusa2.jaxa.jp/en/galleries/onc/nav20180920/201809210419.jpg
UTC 04:17: H2 is 100 meters away from surface.
UTC 04:35 Rover deployment , H2 is 55 meters away.
So we can assume taht the image was taken (at 04:19) when H2 was around 90 meters from surface. Hence landing site should be not so far from where H2 shadow appears in the image.
Is anybody able to draw that point over one of the 3d models available around?
BTW, is there any hires 3d model available now? First models were very raw.
Posted by: mcmcmc Sep 21 2018, 01:31 PM
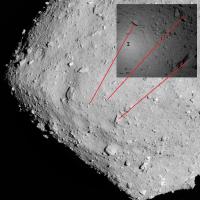
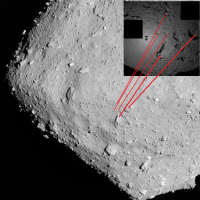
http://www.hayabusa2.jaxa.jp/en/topics/20180905e/img/TDpoint_hyb2_onc_20180720_130914_tvf_l2b.png, upside down, show same features of http://www.hayabusa2.jaxa.jp/en/galleries/onc/nav20180920/201809210305.jpg
Page for first image (Image 10 taken on July 20, 2018 at 13:09UTC):
http://www.hayabusa2.jaxa.jp/en/topics/20180905e/
Posted by: dvandorn Sep 21 2018, 10:26 PM
So, a nice build-up, a bunch of tweets right up to separation, and then... nothing?
Huh? Am I missing something? Is there a secret forum or thread somewhere in here where the current status of the mission is actually being discussed?
Posted by: Hungry4info Sep 22 2018, 12:07 AM
Last I heard they lost contact with them and think it's because they're on the surface of the asteroid on the other side. Though they should have experienced a fully "day" so far now... at least a couple times.
Posted by: Phil Stooke Sep 22 2018, 01:48 AM
It seems we have to wait until Saturday for more news. I don't know why.
Phil
Posted by: dvandorn Sep 22 2018, 03:25 AM
I wonder if they missed again. Or hit and bounced completely off.
Ah, well -- I suppose we'll have a better idea tomorrow. At this point, I guess I'm not anticipating good news... 
-the other Doug
Posted by: Hungry4info Sep 22 2018, 05:12 AM
From
https://www.japantimes.co.jp/news/2018/09/21/national/science-health/japan-space-probe-drops-hopping-rovers-toward-ryugu-asteroid/
Posted by: pandaneko Sep 22 2018, 06:14 AM
What follows is bits and pieces of information from this one hour long press conference yesterday in Japanese.
1. Minerva 21A and 21B were normally seperated at 13:06 JST at the height of 55m. H2 waited for 60 seconds so that thruster fires will
not aftect the seperated rovers and H2 in now heading back to HP.
2. If all went well rovers should have reached Ryugu surface after 15 minutes from the moment of seperatioon. In terms of
communication with the rovers it stopped after about 1.5 hours from the moment of seperation and the reason is thought that rovers are
now experiencing the night time.
3. Ryugu morning is expected to be at around 19:00 JST today, but since rovers are solar powered not enough battery charging may be
possible if they happen to be in the shadows of large boulders.
4. When H2: Earth communications started after seperation Minerva: H2 communication also at the same time started. This has been
confirmed.
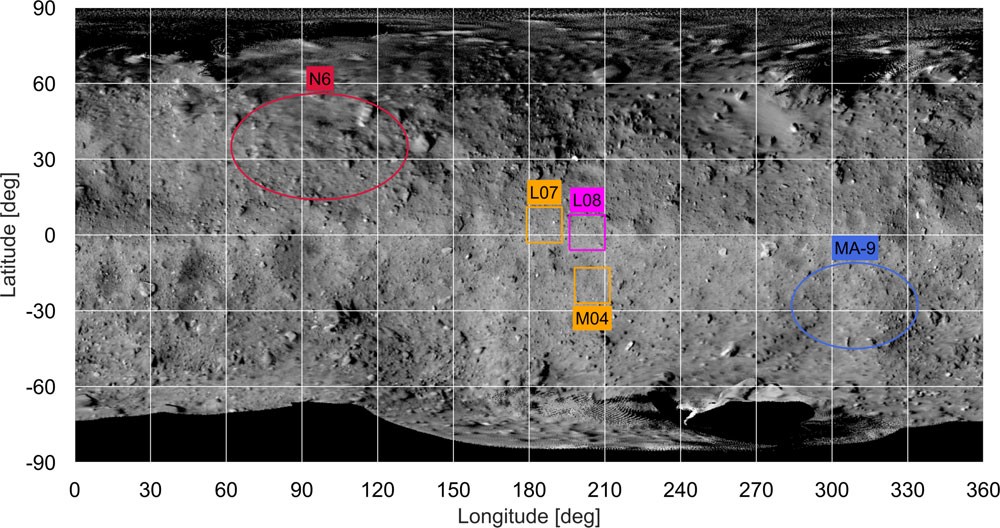
5. Rovers are thought to have landed somewhere within N6, which is about 150m north of the equater. MASCOT will land 200m
south of the eqater.
6. At least one picture was taken and this has been confirmed. However, data will be linked back to earth from earlier data, i.e., 20km
point down, so surface picture aquisition will be delayed, perhaps by a few days from now.
7. It is possible that rovers actually landed and are sleeping now as the only source of power is the sunlight.
8. N6 was chosen mainly because its temp. is thought to be less than other areas.
P
Posted by: pandaneko Sep 22 2018, 06:26 AM
I forgot to add from my press conference notes that:
1. Rovers have very primitive photodiodes so that they can tell H2 if they are dead or alive. Also, gyro sensors will be able to tell the
story about their descent to Ryugu. Also, temp. sensors built into the spikes. All these will be able to say something about the fate
of these rovers, soon.
2. H2 has, in addition to LIDAR, a proximity altitude sensor. Its range overlaps slightly with LIDAR range.
P
Posted by: nprev Sep 22 2018, 06:42 AM
Thanks, Pandaneko. Is the mission being well-covered by the Japanese media? Wondering if you and other people in Japan will get updates faster than the rest of us.
Posted by: mcmcmc Sep 22 2018, 08:32 AM
I found these two twiter accounts which commented in realtime the press conference:
https://twitter.com/moffmiyazaki
https://twitter.com/ShinyaMatsuura
And we can try https://www.google.it/search?q=%E3%81%AF%E3%82%84%E3%81%B6%E3%81%95+2&rlz=1C1ASUM_enIT793IT795&oq=%E3%81%AF%E3%82%84%E3%81%B6%E3%81%95+2&aqs=chrome..69i57j0l5.572j0j7&sourceid=chrome&ie=UTF-8
While we wait, here they are an animation of MINERVA-II separation and an estimation of landing site location:
https://www.youtube.com/watch?v=4FrRC6e8ZMo
A 18cm-wide object would result 2-pixel wide in an ONC-W1 taken from 80m away and 1-pizle wide in ONC-T from 20 km away, so no chance of seeing rovers from "orbit", but maybe some chances to see them in post-deployement ONC-W1 images.
http://win98.altervista.org/telescopio.html (0.00018 km = 18cm)
|
Posted by: pandaneko Sep 22 2018, 08:59 AM

Not at all. I am upset about it, actually. There were many reporters at the press conference from many different media groups, but they
do not seem to write about rovers. My guess is that their bosses ignore them and send their draft articles straight into dustbin.
MASCOT may get more publicity when it lands on Ryugu because it is not Japanese by origin.
P
Posted by: Paolo Sep 22 2018, 12:22 PM
pics from MINERVA!
http://www.hayabusa2.jaxa.jp/topics/20180922/
status (from Japanese twitter): both rovers made it to the surface
https://twitter.com/haya2_jaxa/status/1043473771099615232
Posted by: pandaneko Sep 22 2018, 01:07 PM
Translation of the latest input from JAXA. Please refer to the main page of JAXA in Japanese as there is no Engolish version yet available
with corresponding photos.
2 rovers were seperated from H2 on 21 Sept. (13:06 JST)
It has been confirmed that both safely landed on Ryugu and are both healthy. They took photos and obtained other data and
that they are even hopping on Ryugu surface has been confirmed.
What follows are the photos from these rovers.
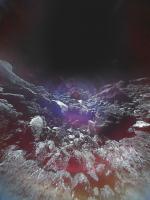
Figure 1:
13:08 on 21 September 2018 by rover 1A, in colour, immediately after seperation while it is spinning. In the photo an object
above is H2 and object bellow is Ryugu surface. Blurring is due to the spin.
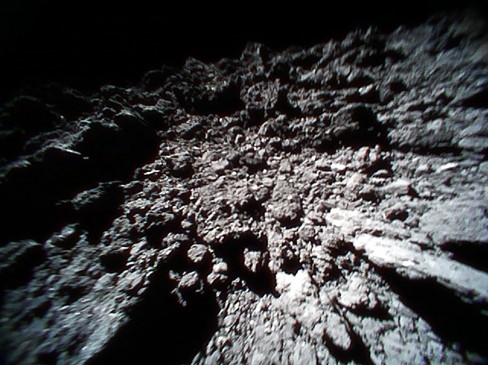
Figure 2:
13:07 JST on 21 September 2018 by rover 1B, in colour, immediately after seperation. Righhand below is Ryugu.
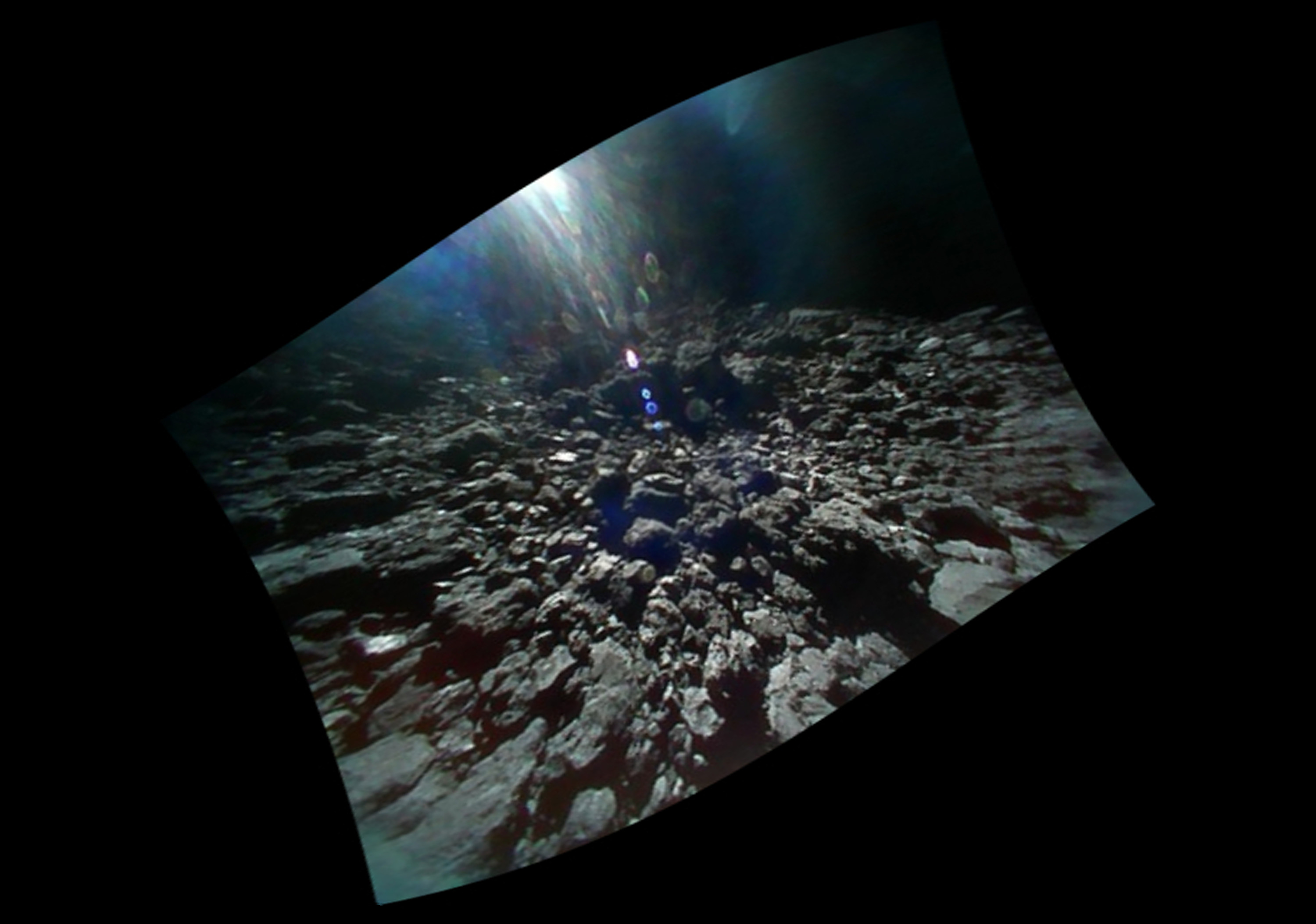
Figure 3:
11:44 on 22 September 2018 by rover 1A, in colour.
This photo was taken while it was hopping. Righthand half is Ryugu.
MINERVA-Ⅱ operati0n will continue and there will be more photos.
P
Posted by: Explorer1 Sep 22 2018, 01:27 PM
Now that's worth the wait.... that's one of the coolest shots I've ever seen; low quality but astonishing (reminds me of the Huygens surface pics!)
Posted by: Blue Sky Sep 22 2018, 01:43 PM
Hopefull there will be some pictures taken when the rover is not in mid-bounce! And some scale information would be helpful, like, is that rock the size of a house or the size of a footstool?
Posted by: yoichi Sep 22 2018, 01:56 PM
fig1
https://twitter.com/haya2e_jaxa/status/1043482666958352385
HAYABUSA2@JAXA @haya2e_jaxa
This is a picture from MINERVA-II1. The color photo was captured by Rover-1A on September 21 around 13:08 JST, immediately after separation from the spacecraft. Hayabusa2 is top and Ryugu's surface is below. The image is blurred because the rover is spinning. #asteroidlanding
fig2
https://twitter.com/haya2e_jaxa/status/1043484079469953025
HAYABUSA2@JAXA @haya2e_jaxa
Photo taken by Rover-1B on Sept 21 at ~13:07 JST. It was captured just after separation from the spacecraft. Ryugu's surface is in the lower right. The misty top left region is due to the reflection of sunlight. 1B seems to rotate slowly after separation, minimising image blur.
fig3
https://twitter.com/haya2e_jaxa/status/1043486871504867329
HAYABUSA2@JAXA @haya2e_jaxa
This dynamic photo was captured by Rover-1A on September 22 at around 11:44 JST. It was taken on Ryugu's surface during a hop. The left-half is the surface of Ryugu, while the white region on the right is due to sunlight. (Hayabusa2 Project)
Posted by: abalone Sep 22 2018, 02:08 PM
http://www.hayabusa2.jaxa.jp/topics/20180922/
Surface images
https://pbs.twimg.com/card_img/1043470417065701376/-8knxdAH?format=jpg&name=600x314
Posted by: yoichi Sep 22 2018, 02:14 PM
press release in english
http://www.hayabusa2.jaxa.jp/en/topics/20180922e/
Posted by: dvandorn Sep 22 2018, 03:30 PM
Outstanding!
I have one thing about which I am curious. The final of the three images states it was taken while its rover was in mid-hop. I'm wondering why any hopping activity was occurring without any commands sent from Earth -- I didn't see any indication of pre-programmed hopping set up in the deployment and landing timelines that JAXA posted. And from the other statements made, both pre- and post-landing, I can't see any indication that hopping actions were commanded during this time.
I *did* see something that indicated that the rovers were expected to "bounce" and take a good 15 minutes to settle down onto the surface in a stable, non-moving attitude.
Could the caption which indicates the rover was hopping really indicate that it was in a bounce and not in a deliberate or commanded hop?
The difference would be like stating that, say, Opportunity was "roving" as it bounced to a stop within Eagle Crater...
Posted by: Explorer1 Sep 22 2018, 03:58 PM
The blurriness rather reminds me of the first image from Philae, though it was quite clear by that point the landing systems had not worked!
Perhaps one or both just hit a boulder at a certain angle and bounced a bit more?
I wonder if the mothership took any pictures after deployment, like Rosetta?
Posted by: Phil Stooke Sep 22 2018, 04:26 PM
Great pictures! I was reminded of the images from Sojourner, especially the little colour camera. Ted Stryk did some great processing of those.
Let's hope for lots more.
Phil
Posted by: J.J. Sep 22 2018, 04:57 PM
Congratulations to JAXA!
Much thanks to you, Pandaneko, for keeping us posted.
Posted by: djellison Sep 22 2018, 05:25 PM
You would absolutely pre-program a long sequence of activities for them, including hops, imaging, temperature measurements and comm passes. Our situational awareness for them is poor. We don't know what way up they will land, if they'll get stuck under a boulder etc etc
Having an autonomous sequence of imaging and hopping would be the only rational way to execute a mission like this.
Posted by: PDP8E Sep 22 2018, 06:38 PM
Well Done JAXA!
My poor little deconvolving suite struggle for about an hour to converge on a better image of H2 a few hundred feet away
No luck but here is a gif of its best try

|
Posted by: neo56 Sep 22 2018, 08:46 PM
Amazing pictures from a tiny world! Congratulations JAXA!
Here is an animation showing the approach of Hayabusa 2 from 20km to 80m:
|
Posted by: mcmcmc Sep 24 2018, 07:44 AM
I have one thing about which I am curious. The final of the three images states it was taken while its rover was in mid-hop. I'm wondering why any hopping activity was occurring without any commands sent from Earth -- I didn't see any indication of pre-programmed hopping set up in the deployment and landing timelines
I don't remember which one, but one rover has an "automatic temperature-triggered hopping engine": every time it passes from light to shadow and viceversa, the mechanism is triggered and the rover bounces.
For ever, as it does not use any fuel but the sun.
It is one out of 4 or 5 different hopping mechanisms being tested.
Posted by: mcmcmc Sep 24 2018, 07:58 AM
Looks like it's the "next one":
http://mineta-lab.yz.yamagata-u.ac.jp/HAYABUSA2.html
Posted by: mcmcmc Sep 24 2018, 09:05 AM
I can't find anything about rovers "1", but quite a lot about rover "2".
Next rover (Minerva-II-2) hopping mechanisms which are going to be tested:
1) Eccentric motor, which consists of a brushless DC motor.
This actuator enables ROVER2 to micro-hop by the motors vibration force
2) Elastic cilia mechanism on the ROVER2 surface fosters micro-hopping capability, and thus this is expected to achieve precise locomotion in a micro-gravity asteroid. (https://ieeexplore.ieee.org/document/6696437/figures)
https://www.facebook.com/Professor.Kazuya.Yoshida/ (last post: 2014).
3) Magnetic permanent magnet mechanism using a DC brush-less motor.
This actuator consists of one movable magnet and two stationary magnets, and enables ROVER2 to hop by the impact force generated when the movable magnet sticks to the stationary magnet. This mechanism provides a large impact force in spite of low power consumption.
4) Metallic and thin leaf spring.
The actuator stores preliminarily the elastic energy of the spring by bending it. This enables ROVER2 to hop by the impact force generated when the bending energy releases. The stored bending energy is locked by tegus before its driving, and will be released all at once by burning off the tegus.
ROVER2 has two metallic springs. Each spring is non-reusable but is highly reliable in harsh space environment because of its simple mechanism.
5) Shape Memory Alloy (SMA).
The most advantage of this actuator is that it can work with a change of surrounding temperature. This enables ROVER2 to hop by the impact force generated when the SMA bends in a specific temperature condition. As for safety launch-lock, this is also locked by tegus so as not to drive in an unexpected situation. Unlike the third actuator using leaf springs, this actuator will be able to work semipermanently with temperature shift.
https://www.researchgate.net/publication/317941615_1A2-L08_Design_of_Environment_Driven_Rover_for_AsteroidSpace_Engineering_and_Robotics_and_Mechatronics1
TSUMAKI Yuichi - Yamagata University
AKAIKE Takahiro - Yamagata University
MINETA Takashi - Yamagata University
TADAKUMA Riichiro - Yamagata University
2015.10.24 http://mineta-lab.yz.yamagata-u.ac.jp/ (Takashi Mineta?) gave a lecture on the MEMS device & Hayabusa 2 Jumping Actuator at the Yonezawa Industry Association Chiba Branch (Chiba City)
https://www.jstage.jst.go.jp/article/jsmermd/2014/0/2014__1P2-N02_1/_article/-char/ja/
"Bimetallic actuator" = のバイメタルアクチュエ
"Hayabusa 2" = はやぶさ2
https://www.google.it/search?q=%E3%81%AE%E3%83%90%E3%82%A4%E3%83%A1%E3%82%BF%E3%83%AB%E3%82%A2%E3%82%AF%E3%83%81%E3%83%A5%E3%82%A8+%E3%81%AF%E3%82%84%E3%81%B6%E3%81%952&oq=%E3%81%AE%E3%83%90%E3%82%A4%E3%83%A1%E3%82%BF%E3%83%AB%E3%82%A2%E3%82%AF%E3%83%81%E3%83%A5%E3%82%A8+%E3%81%AF%E3%82%84%E3%81%B6%E3%81%952&aqs=chrome..69i57.1435j0j4&sourceid=chrome&ie=UTF-8
5b) ROVER2 employs two different SMA mechanisms so that ROVER2 can move in different temperature ranges. Of particular note that the total weight of these four different types of actuators is just 88.1 g. The simplified system design of MINERVA-II2 enables to result in low cost missions.
Development of MINERVA-II2, a Micro-Robot for Asteroid Surface Exploration with Innovative Mobility
Nagaoka, K., Tohoku University
https://www.dlr.de/pf/Portaldata/6/Resources/lcpm/abstracts/Abstract_Nagaoka_K.pdf
Minerva-II-2 paper (in Japanese) about camera:
http://www.kimura-lab.net/wp-content/uploads/2014/11/P51_JSASS-2013-4744.pdf
Shinichi Kimura (Tokyo University of Science)
Posted by: mcmcmc Sep 24 2018, 09:46 AM
Maybe found details about rovers II-1:
MINERVA in Hayabusa mission <previous mission, previous rover>has two actuators inside in order to move. One of them is used as a torque. By rotating the torque, a reaction force against the asteroid surface makes the rover hop with a significant horizontal velocity. After hopping into the free space, it moves ballistically. Based on this mechanism, by changing the magnitude of torque, the hopping speed can be altered, so as not to exceed over the escape velocity from the asteroid surface.
The primary rover <II-1 in Hayabusa 2?> of the packages has the totally same kind of the mobile system[/b]. This time two torquers are aligned orthogonally. By simultaneously rotating the torquers, both the hopping speed and direction are controlled. The hopping speed is basically dominated by the magnitude of torques, while the hopping direction is set by he ratio of two torquers.
https://zapdf.com/intelligent-rover-with-hopping-mechanism-for-asteroid-explor.html
Takashi Kubota
Institute of Space and Astronautical Science
Japan Aerospace Exploration Agency - Sagamihara, Japan
Kubota@isas.jaxa.jp
Tetsuo Yoshimitsu
Institute of Space and Astronautical Science
Japan Aerospace Exploration Agency - Sagamihara, Japan
kikko@nnl.isas.jaxa.j
Posted by: mcmcmc Sep 26 2018, 12:12 PM
HAYABUSA 2 press conference
2018/09/27 15:30-16:30(JST)
2018/09/27 06:30-07:30(GMT)
https://www.youtube.com/watch?v=pJOxlZPlL6o
Posted by: mcmcmc Sep 27 2018, 06:57 AM
Amazing images in the press release 20180927_hayabusa2.pdf , but I can't yet find official link, I downloaded it from another forum.
A dozen of images taken by bouncing rovers!
And plenty of technical data both about MINERVA and MASCOT.
Posted by: RonCatwanson Sep 27 2018, 07:36 AM
A dozen of images taken by bouncing rovers!
And plenty of technical data both about MINERVA and MASCOT.
That's it http://fanfun.jaxa.jp/jaxatv/files/20180927_hayabusa2_e.pdf
Link was published in official press-conference stream description https://www.youtube.com/watch?v=pJOxlZPlL6o
Posted by: mcmcmc Sep 27 2018, 07:59 AM
Pictures:
2018/09/21 06:02 - ONC-W1 just before release, 70 m (page 18)
2018/09/21 06:07 - Rover 1B - p.9
2018/09/21 06:08 - Rover 1A - p.8
2018/09/22 04:44 - Rover 1A - p.10
2018/09/23 02:50 - Rover 1B hop - p.11
2018/09/23 02:55 - Rover 1B hop - p.11
2018/09/23 03:00 - Rover 1B hop - p.11
2018/09/23 02:43 - Rover 1A - p.14
2018/09/23 02:48 - Rover 1A - p.15-16
2018/09/23 03:10 - Rover 1B landing - p.13
2018/09/23 03:34-04:48 - Rover 1B movie (15 frames in 74 minutes, 1 every 5 minutes) - p.17
Does anybody can find the rover movie?!?
Posted by: RonCatwanson Sep 27 2018, 08:03 AM
2018/09/21 06:07 - Rover 1B - p.9
2018/09/21 06:08 - Rover 1A - p.8
2018/09/22 04:44 - Rover 1A - p.10
2018/09/23 02:50 - Rover 1B hop - p.11
2018/09/23 02:55 - Rover 1B hop - p.11
2018/09/23 03:00 - Rover 1B hop - p.11
2018/09/23 02:43 - Rover 1A - p.14
2018/09/23 02:48 - Rover 1A - p.15-16
2018/09/23 03:10 - Rover 1B landing - p.13
2018/09/23 03:34-04:48 - Rover 1B movie (15 frames in 74 minutes, 1 every 5 minutes) - p.17
Does anybody can find the rover movie?!?
here is link with time-stamp. hope JAXA is going to release it. whole movie or by frames
https://www.youtube.com/watch?v=pJOxlZPlL6o&feature=youtu.be&t=20m18s
Posted by: Therion Sep 27 2018, 09:21 AM
http://wonderousworlds.space/_/MINERVA-II-1/180927.html
Posted by: mcmcmc Sep 27 2018, 09:38 AM
Rover movie!
https://twitter.com/Bottlaeric/status/1045222683221340160
(but I expected better resolution and 15 frames rather than 7)
Posted by: pandaneko Sep 27 2018, 10:04 AM
I have watched the latest press briefing. This time, there were not many surprising things, excpet perhaps that both rovers are
healthy and tha they do one hop each day (in the morning). Temp. range is from about -20 o +30. The camera angle is 125 degrees along
the diagonal of the pictures that we see.
JAXA showed a short movie made from 15 frames. OCN-W1 and OCN-T both found either rovers or their cover, as shining objects, but
they are still unsure what they actually are. They are found near N6.
Most of the press briefing was spent on MASCOT and MASCOT operation will be starting from 30 September to 4 October including
preperation. Actually, they even, during rover operation, started preperation for preperation for MASCOT.
P
Posted by: pandaneko Sep 27 2018, 10:08 AM
With so many small rock pieces with no sign of sands I am already pessimistic about sampler horn catching any form Ryugu surface.
These rock pieces seem very hard even for high speed bullets!
P
Posted by: mcmcmc Sep 27 2018, 10:25 AM
Official page with images and video is out!
http://www.hayabusa2.jaxa.jp/en/topics/20180927e_MNRV/
Posted by: Explorer1 Sep 27 2018, 12:53 PM
Incredible images, wow! I would like to see these images too:
they are still unsure what they actually are. They are found near N6.
If they keep bouncing, how far will they go? Hopefully not interfering with the other landers! Plus, it would complicate any attempts to map each hop, as if it weren't hard enough! Good luck Phil!
Highest res image, from 64 metres away, is here: http://www.hayabusa2.jaxa.jp/en/topics/20180927e_HighestRes/
Posted by: Paolo Sep 27 2018, 06:03 PM
I guess there is a corollary to Murphy's law: your asteroid rover can land in infinite^3 attitudes, but the camera will end facing the sun
Posted by: jch Sep 27 2018, 06:16 PM
http://www.hayabusa2.jaxa.jp/en/topics/20180927e_HighestRes/img/fig2.jpg
http://www.hayabusa2.jaxa.jp/en/topics/20180927e_HighestRes/img/fig1_onc20180921_0404_scale.jpg
http://www.hayabusa2.jaxa.jp/en/topics/20180927e_MNRV/img/fig2_R1B_JST20180923-0946.jpg
http://www.hayabusa2.jaxa.jp/en/topics/20180927e_MNRV/img/fig3_R1B_JST20180923-1010.jpg
http://www.hayabusa2.jaxa.jp/en/topics/20180927e_MNRV/img/fig4_R1A_JST20180923-0943.jpg
...and this gem:
http://www.hayabusa2.jaxa.jp/en/topics/20180927e_MNRV/img/rover1b_sol07_movie.mov
Posted by: mcmcmc Sep 27 2018, 06:57 PM
Page 19: http://fanfun.jaxa.jp/jaxatv/files/20180927_hayabusa2_e.pdf
Posted by: Explorer1 Sep 27 2018, 07:58 PM
Thank you! Can't wait for more images! I wonder how long the rovers will last; perhaps when MASCOT lands too?
Posted by: mcmcmc Sep 27 2018, 09:08 PM
They have solar panels, they are in full sunlight, and MASCOT is coming within less than a week, so I'm quite sure they'll all live together on Ryugu for a while.
But MASCOT will land on the opposite side, per schedule.
Posted by: Phil Stooke Sep 27 2018, 10:13 PM
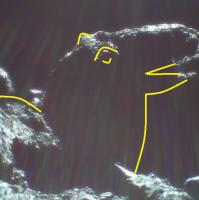
Here's a 'new' image synthesized from the frames of the movie. I masked out the sun glare on each frame and merged them.
In answer to mcmcmc's comment above about expecting 15 frames rather than 7 - that was a subset of the frames. There actually were 15 in the full video.
Phil
|
Posted by: Explorer1 Sep 28 2018, 01:09 AM
Wonderful work! I wonder what they would look like if the 'fisheye' view was corrected (like the Venera surface views, though not as extreme)?
Posted by: mcmcmc Sep 28 2018, 07:38 AM
Is anybody able to figure out how to use http://hugin.sourceforge.net/ to convert a 125° fisheye to an equirectangular projection?
There are also an ImageMagick http://www.fmwconcepts.com/imagemagick/fisheye2pano/index.phpand https://www.giss.nasa.gov/tools/gprojector/ to play with. 
Others to try:
http://t.nomoto.org/Cube2DM/index_en.html
https://www.ptgui.com/man/projections.html
https://revisionfx.com/products/relens/nuke/
Posted by: climber Sep 28 2018, 08:45 AM
There are also an ImageMagick http://www.fmwconcepts.com/imagemagick/fisheye2pano/index.phpand https://www.giss.nasa.gov/tools/gprojector/ to play with.
Wondering if this from John Major is what youre asking for:
https://twitter.com/jpmajor/status/1045358522781847552?s=21
Posted by: mcmcmc Sep 28 2018, 09:25 AM
https://twitter.com/jpmajor/status/1045358522781847552?s=21
I don't know, he doesn't provide any processing details, I'll try asking.
Posted by: pandaneko Sep 28 2018, 02:45 PM
I think somebody said something about rover hopping on this forum. I also have read something about it. Apparently, they are
programmed to hop out of darkness automatically. So, they do one hopping each morning and if they fall into a shade they will
automatically hop again.
If they find themselves yet again in a shade, presumably they will hop again. If then again they land in a shade their battery power may
be running out already and presumably they will die there, I think.
They are perhaps like sunlight hoppers.
P
Posted by: mcmcmc Sep 28 2018, 04:47 PM
Prof. Thttps://www.abdn.ac.uk/ims/research/microbiology/profiles/t.kubota, the designer of previous MINERVA-I rover on Hayabusa 1, on request kindly sent me the paper he published as chapter 6 of book "https://books.google.it/books/about/Intelligence_for_Space_Robotics.html?id=dFHJAgAACAAJ&redir_esc=y", titled, "Intelligent Rover with Advanced Mobility for Minor Body Surface Exploration".
I asked him:
I am following MINERVA-II-1 rovers operations on Ryugu, but I cannot find much technical data about them. Can you suggest any link or paper where I can read some details? I would like to figure out which mobility system they use w.r.t. MINERVA-I , and if they are remotely or autonomusly operated.
Are the two rovers identical?
and his answer is:
MINERVA-II can hop by an inner torquer (motor).
MINERVA-II can explore Ryugu autonomously.
Two rovers are almost identical.
Takashi
But he does not specify if he's talking about rovers 1a/1b or rover 2, so... who knows?!? I guess I'll have to ask again.
I wrote to kubota dot takashi at jaxa dot jp but can't remember in which page/document I found this.
He has other emails:
https://www.abdn.ac.uk/ims/research/microbiology/profiles/t.kubota
http://robotics.isas.jaxa.jp/kubota_lab/en/people.html
Posted by: fredk Sep 28 2018, 05:34 PM
I've taken the time lapse and normalized each of the R, G, B channels to smooth out the exposure changes and colour shifts:

|
I've made no other edits.
(Sorry about the dithery gif; I'm not sure what other format to use...)
Posted by: mcmcmc Sep 28 2018, 05:57 PM
There are also [...]
I think I got something.
Process:
1) Use Irfanview or any other editor to rotate the image to get an horizontal horizon
2) Launch Hugin
3) Import the single image specifying "circular fisheye" and "125°" as parameters
4) Click on last tab ("Assembler"? It's "Assemblatore" in italian)
5) Click on first button ("Calcola area inquadrata") to get new horizontal and vertical FOV
6) Click "assemble!" button
7) Copy the resulting image on your gyro-equipped Android phone
8) Open it using https://play.google.com/store/apps/details?id=com.xojot.vrplayer
9) Select "standard view".
10) Move around the phone to look around you, or select the cardboard icon and use any cardboard viewer.
11) Don't foget to dressup you spacesuit, it's cold up there! (and you'll feel like being there!)
Examples:

Becomes:
Becomes:

Posted by: Phil Stooke Sep 28 2018, 06:01 PM
That's very nice.
The merged image I posted above looked fine on my laptop, but when I saw it on a mobile device the colours were rather bizarre, so in case you saw it that way and thought I was re-living the 60s, here is a monochrome version.
Phil

|
Posted by: mcmcmc Sep 28 2018, 07:09 PM
I don't know how much scientific it is... but amazing it is by sure! :-)
http://win98.altervista.org/hayabusa2/panomovie01.avi
As above, look at it with cardboard and VR Player.
Used VirtualDub to split into single frames, Hugin to reproject, VideoPad to get back into .AVI.
Posted by: mcmcmc Sep 29 2018, 10:13 AM
Found an unofficial transcript/translation of 27/sep press conference:
https://lizard-isana.github.io/jspt/hy2_press_conference_2018_09_27.html
Quotes:
* Ryugu rotation period is 7.6 hours, which means 3.16 Sols per EarthDay.
* Rovers delivery happened at 21/09/2018 04.35 GMT .
* Press conference was held 27/09/2018 04.30-05:30 GMT .
* Difference: 6 days, 19 Sols
Posted by: Paolo Oct 1 2018, 08:43 AM
This week, the MINERVA-II1 rovers that landed on the asteroid last week sent images from the asteroid surface. No regolith was seen in these images, only a shocking scenery of large and small boulders. On the other hand, the scenes of sunlight on the asteroid and the rover hopping were both very beautiful and dynamic. Next week is the deployment of the MASCOT lander. The decent operation is always a nervous time and we want to deliver the lander steadily and carefully. (Regolith: fine grain sediments).
I didn't notice it at first, but the rover images show small pebbles and rocks, but little or no sand and dust
Posted by: wildespace Oct 1 2018, 09:04 AM
I've also spotted that, looks very rubbly, like a comet's "rubble mantle". What happened to all the fine dust, maybe it fell in through the boulders and is somewhere below them?
Posted by: charborob Oct 4 2018, 02:10 PM
Any news from the Minerva landers? Are they still working? I hope we get some more pictures.
Posted by: dolphin Oct 5 2018, 05:20 AM
A nuke would obliterate Ryugu. It is seemingly loosely cobbled together through and through.
Posted by: PaulH51 Dec 13 2018, 11:23 AM
Tweet
'Weve named our MINERVA-II1 rovers! Named for the symbol of the mythological Roman goddess, Minerva, Rover-1A and Rover-1B are now Owl and Hibou (horned own in French).'
link: https://twitter.com/haya2e_jaxa/status/1073159319204421632

|
Posted by: Hungry4info Dec 13 2018, 09:31 PM
There are new images from MINERVA-II1.
I've found these four here. Are there any more anywhere?
https://phys.org/news/2018-12-photos-japan-space-rovers-rocky.html
Additionally, from that source,

|
|

|

|
Posted by: kenny Dec 14 2018, 03:58 PM
The merged image I posted above looked fine on my laptop, but when I saw it on a mobile device the colours were rather bizarre, so in case you saw it that way and thought I was re-living the 60s, here is a monochrome version.
Phil
|
|
In Phil's post above, does anyone else notice the apparent light-colored layer running through the black boulder just right of centre ?
Is it actually layering in the rock?
Posted by: Steve5304 Dec 20 2018, 02:45 PM
Is it actually layering in the rock?
Interesting catch. Really hard to tell with the image if its a reflection or some sort of camera artifact.
Its also not impossible for a rock to be layered on a asteroid i suppose. Rock could of came from anywhere.
Posted by: Hungry4info Feb 7 2019, 02:06 AM
The December 2018 press conference pdf, http://www.hayabusa2.jaxa.jp/en/enjoy/material/press/Hayabusa2_Press20181213_verK_EN2.pdf, had a number of new images that we had not seen before, that I didn't see mentioned here, including some that were taken on Sols as high as 113.

|

|

|

|
Posted by: Marcin600 Feb 7 2019, 05:21 PM
But did it really exist ... on Ryugu?
A small joke waiting for next Ryugu photos that we all miss.
Sampling this month will be really exciting!

|
|
Powered by Invision Power Board (http://www.invisionboard.com)
© Invision Power Services (http://www.invisionpower.com)