ExoMars - Schiaparelli landing |

  |
ExoMars - Schiaparelli landing |
 Nov 27 2016, 02:31 AM Nov 27 2016, 02:31 AM
Post
#166
|
|
|
Senior Member  Group: Members Posts: 1592 Joined: 14-October 05 From: Vermont Member No.: 530 |
QUOTE (PDP8E @ Nov 24 2016, 07:35 PM)  ESA has told us that they have simulated the fault and it matches what happened. OK.... but... The problem is that the 'glitch' makes as much sense as the Italian Space Agency's story a few days ago. And there is a very good reason for that. We have no insight into the EDL software design used by the ESA designers and programmers As an RTOS programmer for decades (VxWorks, also used by MER, Pathfinder, Odyssey, etc) , sanity checks are part of the landscape. For example: when the craft is at an altitude of 4 Km and in the next second it thinks it is 'on the ground', one of the background sanity checks would have said 'we just accelerated to 14 Million KM/hr -- ignore the readings, wait until they get back in 'range', and do it again. .... Ariane V initial launch? It would have failed your sanity checks. Nonetheless he software commanded a wild course correction. I just don't know how many layers of "wait and see" you're supposed to put in there though. Ariane V may well have had plenty of "wait and see" but not amount of it was going to undo the overflow. You can reject a certain amount of garbage data, but eventually that might be all you have left. |
 |
 
|
|
Nov 27 2016, 12:53 PM
Post
#167
|
|
|
Member Group: Members Posts: 128 Joined: 10-December 06 From: Atlanta Member No.: 1472 |
There is a limit of the number of such sanity checks you can explicitly implement in a control system. You get a huge number of rules because you need to consider different combinations of inputs. Instead, since the time of Apollo, most (all?) s/c control systems have used Kalman filter or one of its descendants. The basic idea is that each piece of input comes with a measure of its accuracy that affects how it is incorporated into a state vector. It seems that for Schiaparelli, the control system assigned a higher accuracy to IMU inputs than to the radar readings and therefore rejects radar inputs in favor of the wrong state vector generated from IMU.
|
|
|
|
|
May 24 2017, 01:45 PM
Post
#168
|
|
 Member Group: Members Posts: 968 Joined: 15-June 09 From: Lisbon, Portugal Member No.: 4824 |
ESA has just announced that the Schiaparelli landing investigation has been completed. A report summary can be downloaded from this page.
Here is an excerpt: QUOTE Around three minutes after atmospheric entry the parachute deployed, but the module experienced unexpected high rotation rates. This resulted in a brief 'saturation' where the expected measurement range is exceeded of the Inertial Measurement Unit, which measures the lander's rotation rate. The saturation resulted in a large attitude estimation error by the guidance, navigation and control system software. The incorrect attitude estimate, when combined with the later radar measurements, resulted in the computer calculating that it was below ground level. This resulted in the early release of the parachute and back-shell, a brief firing of the thrusters for only 3 sec instead of 30 sec, and the activation of the on-ground system as if Schiaparelli had landed. The surface science package returned one housekeeping data packet before the signal was lost. Fernando |
|
|
|
|
May 24 2017, 07:16 PM
Post
#169
|
|
|
Senior Member Group: Members Posts: 2542 Joined: 13-September 05 Member No.: 497 |
QUOTE (nogal @ May 24 2017, 05:45 AM) A report summary can be downloaded from this page. Wow. Basically there were several issues, but there was one parameter that was supposed to be 15 msec and was set to some unstated larger value and nobody caught it. QUOTE It should be borne in mind that if the persistence time of the IMU saturation flag would have been 15 ms the landing would probably have been successful, in which case the other root causes would probably never have been identified. That's gotta hurt. -------------------- Disclaimer: This post is based on public information only. Any opinions are my own.
|
|
|
|
|
May 24 2017, 09:34 PM
Post
#170
|
|
|
Senior Member Group: Members Posts: 2106 Joined: 13-February 10 From: Ontario Member No.: 5221 |
It always does. Just like Mars Observer and the metric mixup, or Galileo and the HGA, or Genesis accelerators being upside down, or (for ESA) the Huygens Channel A. Nothing to do but live with it and learn from mistakes.
|
|
|
|
|
May 24 2017, 09:45 PM
Post
#171
|
|
|
Senior Member Group: Members Posts: 2542 Joined: 13-September 05 Member No.: 497 |
QUOTE (Explorer1 @ May 24 2017, 01:34 PM) Just like Mars Observer and the metric mixup... That's Mars Climate Orbiter. The Mars Observer problem was a lot more subtle (as was the Galileo problem.) -------------------- Disclaimer: This post is based on public information only. Any opinions are my own.
|
|
|
|
|
May 24 2017, 09:50 PM
Post
#172
|
|
|
Senior Member Group: Members Posts: 2106 Joined: 13-February 10 From: Ontario Member No.: 5221 |
Oops, yes. Looking at the report, I note that they used the observations Oppy took of its heat shield during their analysis. Good use of ground truth and previous experience to build on for the future.
Also from page 18, for something this thread discussed: QUOTE SIB members confirmed that the cancelled subsonic High Altitude Drop Test would not have revealed the underestimated supersonic dynamic behaviour of the parachute at Mach 2
|
|
|
|
|
May 25 2017, 06:36 AM
Post
#173
|
|
|
Member Group: Members Posts: 808 Joined: 10-October 06 From: Maynard Mass USA Member No.: 1241 |
As mentioned upstream in the thread, a few overriding sanity checks can and should be layered on top of the real-time Kalman NAV computer in an EXEC manner.
(underlines are mine) (ESA) Recommendation 05 Robust and reliable sanity checks shall be implemented in the on-board S/W to increase the robustness of the design, which could be, but not limited to : - Check on attitude - Check on altitude sign (altitude cannot be negative). - Check on vertical acceleration during terminal descent and landing (cannot be higher than gravity). - Check altitude magnitude change (it cannot change from 3.7 Km to a negative value in one second). - Check wrt pre-flight timeline (altitude or acceleration profile vs time) to check consistency of measurements Let's get this done and see a working 2020 lander on the surface of Mars! -------------------- CLA CLL
|
|
|
|
|
Sep 14 2018, 05:46 PM
Post
#174
|
|
 Senior Member Group: Members Posts: 1729 Joined: 3-August 06 From: 43° 35' 53" N 1° 26' 35" E Member No.: 1004 |
it turns out Schiaparelli finally did provide a little bit of science data:
ExoMars 2016 Schiaparelli Module Trajectory and Atmospheric Profiles Reconstruction (pdf freely downloadable) |
|
|
|
| Guest_mcmcmc_* |
Nov 20 2018, 10:21 AM
Post
#175
|
|
Guests |
QUOTE (Paolo @ Sep 14 2018, 06:46 PM) it turns out Schiaparelli finally did provide a little bit of science data: ExoMars 2016 Schiaparelli Module Trajectory and Atmospheric Profiles Reconstruction (pdf freely downloadable) The PDF led me to this page which I will have to investigate a lot! From PDF: QUOTE The Entry Interface Point (EIP) with the atmosphere was detected by Schiaparelli on 19th October 2016 at 14:42:22 Coordinated Universal Time (UTC). This event was the beginning of the EDL sequence. The first part of the EDL was the hypersonic entry phase that lasted about 181 s as expected by simulations. The Parachute Drogue Deployment (PDD) has been commanded by the GNC computer at 14:45:23 as expected, then the FS has been Released (FSR) after about 41 s at 14:46:04. The BS was separated after a further 41 s at 14:46:46 (earlier than expected). Then the thrusters were activated at 14:46:50 but for only 3 s, after which the Surface Platform fell under gravity until surface impact. See TolkerNielsen (2017) for a summary of the anomaly. Summary: 14:42:22 Atmosphere entry (T0) 14:45:23 Parachute opening (T1=T0+181) 14:46:04 Heatshield (T2=T0+222 , T1+41) 14:46:46 Parachute/backshield released (T3=T0+263 , T2+41) 14:46:50 Thrusters on (T4=T0+267, T3+4) 14:46:53 Thrusters off, freefall from 2.76 km altitude(T5=T0+270 , T4+3) 14:46:58: end of data (?) QUOTE Available data cover the time span from 14:22:43 to 14:46:58
|
|
|
|
|
May 12 2019, 10:15 PM
Post
#176
|
||
|
Solar System Cartographer Group: Members Posts: 10229 Joined: 5-April 05 From: Canada Member No.: 227 |
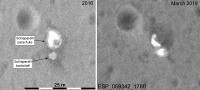
The Schiaparelli parachute has shifted a bit in the wind between 2016 and 2019:
I will try to update this with the older image ID and date later. The images have slightly different orientations. Phil -------------------- ... because the Solar System ain't gonna map itself.
Also to be found posting similar content on https://mastodon.social/@PhilStooke Maps for download (free PDF: https://upload.wikimedia.org/wikipedia/comm...Cartography.pdf NOTE: everything created by me which I post on UMSF is considered to be in the public domain (NOT CC, public domain) |
|
|
|
|
|
|
May 13 2019, 06:59 PM
Post
#177
|
||
|
Solar System Cartographer Group: Members Posts: 10229 Joined: 5-April 05 From: Canada Member No.: 227 |
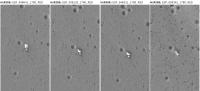
Here's the full set of available images of the Schiaparelli parachute. The first 3 are all in late 2016 and show a quick change to the parachute after landing. The last one is from this March and shows a bit more movement, or perhaps parts being covered with dust.
Phil
-------------------- ... because the Solar System ain't gonna map itself.
Also to be found posting similar content on https://mastodon.social/@PhilStooke Maps for download (free PDF: https://upload.wikimedia.org/wikipedia/comm...Cartography.pdf NOTE: everything created by me which I post on UMSF is considered to be in the public domain (NOT CC, public domain) |
|
|
|
|
|
|
May 14 2019, 02:13 AM
Post
#178
|
|
 Senior Member Group: Members Posts: 2530 Joined: 20-April 05 Member No.: 321 |
I think all future flight logic systems can WLOG rule out the possibility that a descending lander is below the surface.
*without loss of generality |
|
|
|
|

|
Lo-Fi Version | Time is now: 26th September 2024 - 12:51 PM |
|
RULES AND GUIDELINES Please read the Forum Rules and Guidelines before posting. IMAGE COPYRIGHT |
OPINIONS AND MODERATION Opinions expressed on UnmannedSpaceflight.com are those of the individual posters and do not necessarily reflect the opinions of UnmannedSpaceflight.com or The Planetary Society. The all-volunteer UnmannedSpaceflight.com moderation team is wholly independent of The Planetary Society. The Planetary Society has no influence over decisions made by the UnmannedSpaceflight.com moderators. |
SUPPORT THE FORUM Unmannedspaceflight.com is funded by the Planetary Society. Please consider supporting our work and many other projects by donating to the Society or becoming a member. |
|