Opportunity Route Map |

  |
Opportunity Route Map |
 Oct 25 2005, 04:38 PM Oct 25 2005, 04:38 PM
Post
#841
|
|
|
Senior Member  Group: Members Posts: 1636 Joined: 9-May 05 From: Lima, Peru Member No.: 385 |
QUOTE (Tesheiner @ Oct 25 2005, 03:20 AM) That 90º value was taken from the MER Pancam Data Tracking Web Interface and more then official it can be considered "internal" (or technical) information. That was the heading programmed to the pancam when taking the first of four shots of what is usually called "drive direction panorama". -1.57071 is the heading in radians; look it yourself and you will see a series of four shots, the first pointing at -90º and the next three ones with a clockwise added delta of 13.333º. --- Expected EDRs by sequence number and image type: Sol Seq.Ver ETH ESF EDN EFF ERP Tot Description --- -------- --- --- --- --- --- ---- ----------- 621 p0755.03 10 0 0 10 0 20 navcam_5x1_az_270_3_bpp 621 p1212.02 2 0 0 2 0 4 front_haz_ultimate_2_bpp ... 621 p1600.01 20 0 0 20 0 40 navcam_10x1_az_0_1_bpp 621 p1655.01 10 0 0 10 0 20 navcam_5x1_az_90_1_bpp 621 p2124.03 3 3 0 0 1 7 pancam_cal_targ_L456 621 p2406.06 8 0 0 8 2 18 pancam_drive_direction_4x1_L2R2 ... Summary for: bp2406.06a.pancam_drive_direction_4x1_L2R2.rml: ETH ESF EDN EFF EHG ERS ECS ERP Total ---- ---- ---- ---- ---- ---- ---- ---- ----- 8 0 0 8 0 0 0 2 18 Duration (hhmmss) = 00:10:43 Data Vol (Mbits) = 24.28 --------------------------- bp2406.06a.pancam_drive_direction_4x1_L2R2.rml: --------------------------- cmdname pri id img hist rsum csum ref lcam rcam frm c1 c2 c3 frmarg lflt rflt acq shut exp lscl rscl lexp rexp ltbl rtbl updt thres pxfrc iter perc bdpx flat subf rstrt cstrt nr nc dwnsmp ph pw pxscl comp bpp minls wfilt ndcmp nseg RUN_FILTER_POS LPAN 7 RUN_FILTER_HOME LPAN CCW RUN_FILTER_POS RPAN 7 RUN_FILTER_HOME RPAN CCW CAPTURE_IMAGE 26 1000001 TRUE FALSE FALSE FALSE TRUE LPAN RPAN LVL_AZ -1.57071 -0.09599 0.0 NA PANL2 PANR2 LIVE COND AUTO 1 1 50 50 ARG ARG TRUE 2500 1 6 10 FALSE FALSE NONE 0 0 1024 1024 NONE 1 1 NONE ICER 3 0 A 4 20 CAPTURE_IMAGE 26 1000002 TRUE FALSE FALSE FALSE FALSE LPAN RPAN LVL_AZ -1.33806 -0.09599 0.0 NA PANL2 PANR2 LIVE COND AUTO 1 1 50 50 LPAN2 RPAN2 TRUE 2500 1 6 10 FALSE FALSE NONE 0 0 1024 1024 NONE 1 1 NONE ICER 3 0 A 4 20 CAPTURE_IMAGE 26 1000003 TRUE FALSE FALSE FALSE FALSE LPAN RPAN LVL_AZ -1.1054 -0.09599 0.0 NA PANL2 PANR2 LIVE COND AUTO 1 1 50 50 LPAN2 RPAN2 TRUE 2500 1 6 10 FALSE FALSE NONE 0 0 1024 1024 NONE 1 1 NONE ICER 3 0 A 4 20 CAPTURE_IMAGE 26 1000004 TRUE FALSE FALSE FALSE FALSE LPAN RPAN LVL_AZ -0.87275 -0.09599 0.0 NA PANL2 PANR2 LIVE COND AUTO 1 1 50 50 LPAN2 RPAN2 TRUE 2500 1 6 10 FALSE FALSE NONE 0 0 1024 1024 NONE 1 1 NONE ICER 3 0 A 4 20 ---  Tesheiner: That is a unknow terrain, about the engineering commands, for me! Hope that is good information to guide us about the orientation of rover. However, do you have any manual guide to interpret these commands and their parameters? On the other hand, these instructions, some are intuitive to interpret the meaning of the execution of the command. Thus, I would like to have a guide manual about these instrucitons in order to understand them. Back to your question, so we can take the the rover position after identifying some visible positions as you have suggested at the previous post. With four reference position is more than enough. I think that the minumum is 3 for a good ubication trace. Rodolfo Rodolfo |
 |
 
|
|
Oct 25 2005, 11:07 PM
Post
#842
|
|
 Senior Member Group: Members Posts: 2492 Joined: 15-January 05 From: center Italy Member No.: 150 |
QUOTE (Tesheiner @ Oct 25 2005, 10:08 AM) Dilo, a comment to your route map. Have a look to my proposed position for sols 619 and 621 and compare with the ones on your map; there is a significant difference on the headings. The rover tracks on your last map are positioned at about 30º NNW while on mine they are at about 7º -- nearly north. I'm now quite confident of that positions and it looks like the reason for that discrepancy on the headings is that your map is accumulating errors. Do you remember that discussion on the Spirit Route Map thread about the methods to plot a route map? The stitching of sol 621 vertical projection on the map is very good, but day after day such a process propagate its small errors to the future. I have the impression that the map is a bit rotated counter-clockwise. Probably you are right, even if I'n not sure heading difference is so big. I already suspected something wrong looking to ripples orientation (which is no more NS as usual in the last projections), but alignment with distant outcrops seemed good. In the past, I periodically corrected these orientation issues through comparison with MGS image, now I definively need a more precise method but I'm not sure which is best... -------------------- I always think before posting! - Marco -
|
|
|
|
|
Oct 25 2005, 11:26 PM
Post
#843
|
|
|
Solar System Cartographer Group: Members Posts: 10149 Joined: 5-April 05 From: Canada Member No.: 227 |
Dilo - one option is to use an extreme enlargement of the MGS image as a background. As you add each of your reprojections, match it as well as possible to the background image. This will help to prevent errors accumulating across the image. It would be what is called a semicontrolled mosaic.
Phil -------------------- ... because the Solar System ain't gonna map itself.
Also to be found posting similar content on https://mastodon.social/@PhilStooke NOTE: everything created by me which I post on UMSF is considered to be in the public domain (NOT CC, public domain) |
|
|
|
|
Oct 26 2005, 06:31 AM
Post
#844
|
|
|
Senior Member Group: Members Posts: 2492 Joined: 15-January 05 From: center Italy Member No.: 150 |
QUOTE (Phil Stooke @ Oct 25 2005, 11:26 PM) Dilo - one option is to use an extreme enlargement of the MGS image as a background. As you add each of your reprojections, match it as well as possible to the background image. This will help to prevent errors accumulating across the image. It would be what is called a semicontrolled mosaic. Phil Thanks Phil, in fact I was considering this option... However, this method do not solve issues in very uniform patches like the present one. Here I must use also some kind of distant well known referring point (like the small West crater already used by Tesheiner); otherwise, I should go to MER Pancam Data Tracking Web Interface (I must admit this last option worries me because interpretation do not seems easy  !). !).I will implement at least one of these methods in my next route... promised! 
-------------------- I always think before posting! - Marco -
|
|
|
|
|
Oct 26 2005, 08:43 AM
Post
#845
|
|
|
Senior Member Group: Moderator Posts: 4279 Joined: 19-April 05 From: .br at .es Member No.: 253 |
Another suggestion...
You can use a polar projection to obtain the best alignment to those reference points and then make the vertical projection maintaining the same heading but slightly moving it on the x and y axis to find the "best fit" with your current mosaic. Anyway, and while Oppy is moving on this "sea of dunes" I will continue to double-check the rover position using the headings to known points. |
|
|
|
|
Oct 27 2005, 09:22 AM
Post
#846
|
|
 Member Group: Members Posts: 531 Joined: 24-August 05 Member No.: 471 |
Sol 624 - New official traverse map (462 KB):
http://shoreline.eng.ohio-state.edu/album/...003/opp_624.jpg -------------------- - blue_scape / Nico -
|
|
|
|
|
Oct 27 2005, 09:54 AM
Post
#847
|
|
|
Senior Member Group: Moderator Posts: 4279 Joined: 19-April 05 From: .br at .es Member No.: 253 |
Official map and still incorrect.
 It is off by about 20m to the north. It is off by about 20m to the north.We already commented that fact some time ago (somewere here in this thread). It is good to have the link to the source of the MER traverse maps but we must take those maps (at least Oppy's) with some care. PS: At their home page (http://shoreline.eng.ohio-state.edu/) you can find the links to both Spirit and Opportunity route maps. |
|
|
|
| Guest_Sunspot_* |
Oct 27 2005, 04:37 PM
Post
#848
|
|
|
Guests |
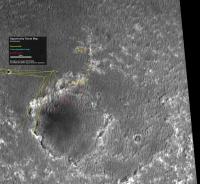
I think they might be planning to go right around Erebus... driving on the areas in the orbital image that appear slightly darker - these areas appear to have much smaller ripples/drifts, as you can see in this navcam image from sol 624:
http://marsrovers.jpl.nasa.gov/gallery/all...WP0755L0M1.HTML Alternate route??
Attached thumbnail(s)
|
|
|
|
|
|
|
Oct 27 2005, 05:05 PM
Post
#849
|
|
|
Member Group: Members Posts: 235 Joined: 2-August 05 Member No.: 451 |
QUOTE (Sunspot @ Oct 27 2005, 11:37 AM) Alternate route?? Why not go just a little further West and hit some more of the salt flats for quicker traverse? |
|
|
|
|
Oct 27 2005, 05:10 PM
Post
#850
|
|
 Member Group: Members Posts: 578 Joined: 5-November 04 From: Denmark Member No.: 107 |
QUOTE (Sunspot @ Oct 27 2005, 04:37 PM) these areas appear to have much smaller ripples/drifts, as you can see in this navcam image from sol 624: http://marsrovers.jpl.nasa.gov/gallery/all...WP0755L0M1.HTML Alternate route?? So maybe we can get back to som old style pedal to the metal driving for a change   This whole experience in the noth Erebus outcrop/dunefield has been a lot time wasting 
-------------------- "I want to make as many people as possible feel like they are part of this adventure. We are going to give everybody a sense of what exploring the surface of another world is really like"
- Steven Squyres |
|
|
|
|
Oct 27 2005, 07:10 PM
Post
#851
|
|
|
Senior Member Group: Members Posts: 1636 Joined: 9-May 05 From: Lima, Peru Member No.: 385 |
QUOTE (Sunspot @ Oct 27 2005, 11:37 AM) I think they might be planning to go right around Erebus... driving on the areas in the orbital image that appear slightly darker - these areas appear to have much smaller ripples/drifts, as you can see in this navcam image from sol 624: http://marsrovers.jpl.nasa.gov/gallery/all...WP0755L0M1.HTML Alternate route?? In the general terms, the route is fine. By that route, it seems most likely that the ripples are lower that makes easier and less riskier to cross. I am not sure that the dark ripples will lead a flatter ripples since I think the colors are subjected by the erosion of remant of stones different than that zone (impact stones). The typical valleys of that zone is oriented more less 10degree from north since the wind blows from north west to south east. That means that the south east side of ripple is softer (fluffy) than the ones of north west side (paved by the wind erosion). To overcome, by climbing it, it is most desirable to go in diagonal and not in straight line of ripple slope if it is somewhat tall for the MER's capabilities (slow speed). At all, the alternate route might be is to go as far west until catch the valley that will lead to south up to Mogollon's rim. This is like a semi-tunnel way. Rodolfo |
|
|
|
| Guest_Sunspot_* |
Oct 28 2005, 01:01 PM
Post
#852
|
|
Guests |
|
|
|
|
|
Oct 28 2005, 01:06 PM
Post
#853
|
|
|
Senior Member Group: Moderator Posts: 4279 Joined: 19-April 05 From: .br at .es Member No.: 253 |
... and moving SW again!
|
|
|
|
|
Oct 28 2005, 01:27 PM
Post
#854
|
||
|
Senior Member Group: Moderator Posts: 4279 Joined: 19-April 05 From: .br at .es Member No.: 253 |
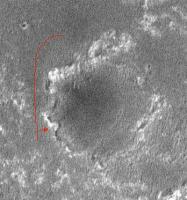
Based on the radials to the west crater and some features at Erebus I plotted the following positions for sols 624 and 625.
I think Oppy is headed to that outcrop at the NW of Erebus. |
|
|
|
|
|
|
Oct 28 2005, 04:24 PM
Post
#855
|
|
|
Senior Member Group: Members Posts: 2998 Joined: 30-October 04 Member No.: 105 |
I think your positions are reasonably close. It's hard to say since there are not landmarks nearby. Attached is a Sol 625 Navcam image, looking southwestward, cropped and stretched 5x. It shows the target NW outcrop and Mogollon beyond it, with the dunes to the left (East). Oppy will be heading between the ripples along the right side of this image. Once she gets to the NW outcrop the driving will be easier for a while and hopefully she'll get there before the dust storm.
--Bill -------------------- |
|
|
|
|

|
Lo-Fi Version | Time is now: 23rd April 2024 - 07:00 AM |
|
RULES AND GUIDELINES Please read the Forum Rules and Guidelines before posting. IMAGE COPYRIGHT |
OPINIONS AND MODERATION Opinions expressed on UnmannedSpaceflight.com are those of the individual posters and do not necessarily reflect the opinions of UnmannedSpaceflight.com or The Planetary Society. The all-volunteer UnmannedSpaceflight.com moderation team is wholly independent of The Planetary Society. The Planetary Society has no influence over decisions made by the UnmannedSpaceflight.com moderators. |
SUPPORT THE FORUM Unmannedspaceflight.com is funded by the Planetary Society. Please consider supporting our work and many other projects by donating to the Society or becoming a member. |
|