Yutu Route Map |

  |
Yutu Route Map |
 Feb 26 2014, 02:14 AM Feb 26 2014, 02:14 AM
Post
#31
|
||
|
Solar System Cartographer  Group: Members Posts: 10256 Joined: 5-April 05 From: Canada Member No.: 227 |
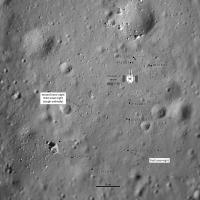
I am updating my route map to show a new estimate of the current position which has been relayed to me privately. That does not mean it is official or certain, only that it is suggested by somebody with connections. I hope to learn more at LPSC.
Phil
-------------------- ... because the Solar System ain't gonna map itself.
Also to be found posting similar content on https://mastodon.social/@PhilStooke Maps for download (free PDF: https://upload.wikimedia.org/wikipedia/comm...Cartography.pdf NOTE: everything created by me which I post on UMSF is considered to be in the public domain (NOT CC, public domain) |
|
 |
 
|
|
|
Feb 26 2014, 03:22 AM
Post
#32
|
|
 Administrator Group: Admin Posts: 5172 Joined: 4-August 05 From: Pasadena, CA, USA, Earth Member No.: 454 |
While the apparent closeness of the lander in the most recent images had made me think it likely they had moved closer, I clearly wasn't confident enough about that to say anything publicly. I would really love an LROC image right about now!
-------------------- My website - My Patreon - @elakdawalla on Twitter - Please support unmannedspaceflight.com by donating here.
|
|
|
|
|
Feb 26 2014, 03:42 PM
Post
#33
|
|
 Senior Member Group: Members Posts: 4260 Joined: 17-January 05 Member No.: 152 |
If the distance between the L and R cameras is known (big if?), or could be measured from a lander photo, it would be simple to measure the distance from the lander in the new stereo pair.
|
|
|
|
|
Feb 26 2014, 04:08 PM
Post
#34
|
|
|
Member Group: Admin Posts: 978 Joined: 29-September 06 From: Pasadena, CA - USA Member No.: 1200 |
Not necessarily. The relative position of the two cameras have huge effects on triangulation. On the other hand if in the image you had features of known size and distance, you could estimate the size and distance of other objects.
Paolo -------------------- Disclaimer: all opinions, ideas and information included here are my own,and should not be intended to represent opinion or policy of my employer.
|
|
|
|
|
Feb 26 2014, 04:19 PM
Post
#35
|
|
|
Senior Member Group: Members Posts: 4260 Joined: 17-January 05 Member No.: 152 |
Yes, that's what I meant - if you knew the relative separation of the L and R rover cameras, then you can find the distance to the lander. I know information is sparse with this mission. But it may be possible to measure the L/R separation from a lander photo of the rover at known distance, or simply by comparing the L/R separation to the total width of the rover, if that's known reasonably well.
Knowing the L/R separation of the rover cameras (orthogonal to their optical axes), then it's a simple matter of trig to convert the measured parallax between the lander and the distant horizon (effectively at infinity) to the lander distance. (Maybe this is what you meant Paolo - without an absolute direction reference, we could not do this, since the L/R optical axes may not be parallel. But we do have such a reference, given by features on the distant horizon in the images.) |
|
|
|
|
Feb 26 2014, 05:20 PM
Post
#36
|
|
|
Founder Group: Chairman Posts: 14448 Joined: 8-February 04 Member No.: 1 |
QUOTE (fredk @ Feb 26 2014, 08:19 AM)  if you knew the relative separation of the L and R rover cameras AND the degree of toe in, if any. |
|
|
|
|
Feb 26 2014, 05:29 PM
Post
#37
|
|
|
Member Group: Admin Posts: 978 Joined: 29-September 06 From: Pasadena, CA - USA Member No.: 1200 |
QUOTE (fredk @ Feb 26 2014, 08:19 AM) ... (Maybe this is what you meant Paolo - without an absolute direction reference, we could not do this, since the L/R optical axes may not be parallel. But we do have such a reference, given by features on the distant horizon in the images.) Yes, that's what I meant. There is some literature on uncalibrated stereo but worked very little on that topic. Features on the horizon might be helpful to determine the vergence but you still need an object of known size in the images. Paolo -------------------- Disclaimer: all opinions, ideas and information included here are my own,and should not be intended to represent opinion or policy of my employer.
|
|
|
|
|
Feb 26 2014, 06:46 PM
Post
#38
|
|
|
Senior Member Group: Members Posts: 4260 Joined: 17-January 05 Member No.: 152 |
QUOTE (djellison @ Feb 26 2014, 05:20 PM) AND the degree of toe in, if any. That can be measured in pixels by looking at the shift in features on the distant horizon (effectively at infinity).The basic problem is that we need to know the pixel scale of the camera to convert pixels to an angle. Equivalently, as Paolo says, we need an object of known size and distance to give us a known angle. I'm used to MER/MSL, where we have that info easily available. But I'm guessing that's not the case with this mission. In principle, we could estimate the pixel scale since we have 360 degree pans. So if we can match distant features between the 360 and these new L/R images, we could estimate angles. Or, we could look at rover pancam images from the first lunar days and estimate the pixel scale from the (presumably) known size of the lander and distance from Phil's map. Then you have to assume/guess that those images are full frame rather than cropped. Either way, a lot of work. |
|
|
|
|
Mar 4 2014, 08:00 PM
Post
#39
|
||
|
Solar System Cartographer Group: Members Posts: 10256 Joined: 5-April 05 From: Canada Member No.: 227 |
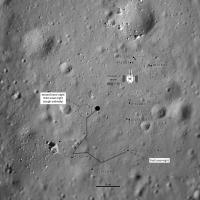
Very quick update based on the new LROC images.
Very interesting! If you look back you will see that the two southern points I mapped earlier were from big display screens in the control room. But of course they might have been target positions rather than real positions. The fact that we never saw a close-up image of the big rock suggests they did not get right up beside it. The tracks are not resolved well enough to be certain of the path here and they might have gone closer. Phil -------------------- ... because the Solar System ain't gonna map itself.
Also to be found posting similar content on https://mastodon.social/@PhilStooke Maps for download (free PDF: https://upload.wikimedia.org/wikipedia/comm...Cartography.pdf NOTE: everything created by me which I post on UMSF is considered to be in the public domain (NOT CC, public domain) |
|
|
|
|
|
|
Mar 4 2014, 10:42 PM
Post
#40
|
|
|
Senior Member Group: Members Posts: 3516 Joined: 4-November 05 From: North Wales Member No.: 542 |
That's very strange. I'm looking at the same images and seeing a simpler track closer to your original one, Phil. Where do you get all the new zigzags from? (And why would they execute them anyway?)
|
|
|
|
|
Mar 4 2014, 11:12 PM
Post
#41
|
|
|
Solar System Cartographer Group: Members Posts: 10256 Joined: 5-April 05 From: Canada Member No.: 227 |
I overlaid the image on my map to get the location exactly right. Other than that it's a matter of interpretation, which marking is part of the track. But I will be looking at it again for a more finished version.
Phil -------------------- ... because the Solar System ain't gonna map itself.
Also to be found posting similar content on https://mastodon.social/@PhilStooke Maps for download (free PDF: https://upload.wikimedia.org/wikipedia/comm...Cartography.pdf NOTE: everything created by me which I post on UMSF is considered to be in the public domain (NOT CC, public domain) |
|
|
|
|
Mar 23 2014, 06:43 PM
Post
#42
|
||
|
Solar System Cartographer Group: Members Posts: 10256 Joined: 5-April 05 From: Canada Member No.: 227 |
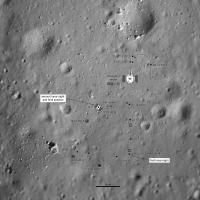
This is a new version of the route map, as complete as I can make it now.
It is based on Chinese maps from the first lunar day, near the lander, and a Chinese map shown at LPSC, modified from my own examination of tracks in images, including a vertical projection of tracks from the middle of day 2, also shown at LPSC. The rover location is from the LROC images and it slightly updates the Chinese map shown at LPSC. Dots are stops between drives, and square symbols are science locations shown on the Chinese map. The dates shown for each stop are my estimates but they may not be correct, as we have almost no reliable information to go on. The rover is shown to scale (approximately) but I don't know its orientation. Phil
-------------------- ... because the Solar System ain't gonna map itself.
Also to be found posting similar content on https://mastodon.social/@PhilStooke Maps for download (free PDF: https://upload.wikimedia.org/wikipedia/comm...Cartography.pdf NOTE: everything created by me which I post on UMSF is considered to be in the public domain (NOT CC, public domain) |
|
|
|
|
|
|
Apr 14 2014, 07:28 AM
Post
#43
|
||
|
Junior Member Group: Members Posts: 31 Joined: 10-January 14 Member No.: 7094 |
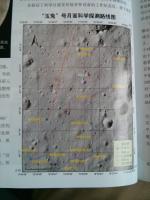
I have read a new magazine
科学世界/Newton , 2014, issue 4: http://www.kxsj.com/html/zixundongtai/zixu...320/103649.html it gave us a official yutu route map
Attached thumbnail(s)
|
|
|
|
|
|
|
Apr 14 2014, 11:09 AM
Post
#44
|
|
|
Solar System Cartographer Group: Members Posts: 10256 Joined: 5-April 05 From: Canada Member No.: 227 |
This is the same map shown on a poster at LPSC in March. My map was based on the new map, but there are places where other information was used to add to my map, especially images of tracks. If you compare this with the LRO image you see that the final rover location is further NE than the site at the end of this map.
Phil -------------------- ... because the Solar System ain't gonna map itself.
Also to be found posting similar content on https://mastodon.social/@PhilStooke Maps for download (free PDF: https://upload.wikimedia.org/wikipedia/comm...Cartography.pdf NOTE: everything created by me which I post on UMSF is considered to be in the public domain (NOT CC, public domain) |
|
|
|
|
Apr 14 2014, 06:31 PM
Post
#45
|
|
|
Junior Member Group: Members Posts: 45 Joined: 18-July 05 Member No.: 439 |
Numbers of positions appear to be straightforward: Nddnn points to lunar day dd, point nn, and a sequential number is added in paretheses. But what is E2, S3, N and H?
|
|
|
|
|

|
Lo-Fi Version | Time is now: 1st November 2024 - 12:02 AM |
|
RULES AND GUIDELINES Please read the Forum Rules and Guidelines before posting. IMAGE COPYRIGHT |
OPINIONS AND MODERATION Opinions expressed on UnmannedSpaceflight.com are those of the individual posters and do not necessarily reflect the opinions of UnmannedSpaceflight.com or The Planetary Society. The all-volunteer UnmannedSpaceflight.com moderation team is wholly independent of The Planetary Society. The Planetary Society has no influence over decisions made by the UnmannedSpaceflight.com moderators. |
SUPPORT THE FORUM Unmannedspaceflight.com is funded by the Planetary Society. Please consider supporting our work and many other projects by donating to the Society or becoming a member. |
|