Printable Version of Topic
Click here to view this topic in its original format
Unmanned Spaceflight.com _ Opportunity _ Strange Mi Images
Posted by: dot.dk Nov 26 2005, 09:39 AM
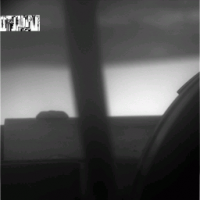
All the latest MI images from Opportunity shows this part of the rover:
http://qt.exploratorium.edu/mars/opportunity/micro_imager/2005-11-25/1M186242157EFF64KCP2957M1M1.JPG
The only thing I can think of is that it is an image taken with the IDD stowed.
Actually the front hazcam pictures confirms this. What can the reason for this be? 
A problem with the IDD so it didn't unstow, but somehow the MI carried out its tasks? 
Posted by: Bill Harris Nov 26 2005, 12:27 PM
Does not look good, dot.dk. Those "odd" MI images were taken first over a period of an hour and then again 4 hours later. It does look like the IDD won't unstow and the dust cover is still in place.
Let me dig and find the planned task sequence for that Sol.
--Bill
Posted by: Bill Harris Nov 26 2005, 12:46 PM
From http://marswatch.astro.cornell.edu/merweb/merweb.pl , here is part of the tracking report:
1. What new EDRs from ANY sol were received on sol 654?
Number of EDRs received by sol, sequence number, and image type:
Sol Seq.Ver ETH ESF EDN EFF ERP Tot Description
--- -------- --- --- --- --- --- ---- -----------
654 p2936.02 1 0 0 1 0 2 mi_open_minloss2_LUT3_veryhigh
654 p2936.02 1 0 0 1 0 2 mi_open_minloss2_LUT3_veryhigh
654 p2936.02 1 0 0 1 0 2 mi_open_minloss2_LUT3_veryhigh
654 p2936.02 1 0 0 1 0 2 mi_open_minloss2_LUT3_veryhigh
654 p2936.02 1 0 0 1 0 2 mi_open_minloss2_LUT3_veryhigh
654 p2936.02 1 0 0 1 0 2 mi_open_minloss2_LUT3_veryhigh
654 p2936.02 1 0 0 1 0 2 mi_open_minloss2_LUT3_veryhigh
654 p2936.02 1 0 0 1 0 2 mi_open_minloss2_LUT3_veryhigh
654 p2936.02 1 0 0 1 0 2 mi_open_minloss2_LUT3_veryhigh
654 p2936.02 1 0 0 1 0 2 mi_open_minloss2_LUT3_veryhigh
654 p2956.02 1 0 0 1 0 2 mi_open_minloss2_LUT3_high_DNTH2000
<snip>
I don't know what the interpretation of this is, so I'll leave it to others.
--Bill
Posted by: Decepticon Nov 26 2005, 12:49 PM
Are there anymore pics like this?
Posted by: Sunspot Nov 26 2005, 01:34 PM
If the sequence to deploy and carefully postion the IDD arm hadn't worked, would the sequence designed to take the images have started? I would have thought it wouldn't - just a guess though.
6. What unexpected sequences ran? (that is, sequences we did not enter in the SSF
list file /home/mersci/pan/B/ops/Sol_all_seq_list.txt)
No unexpected sequences run.
Thats the only problem with the pancam tracking site - lots of information, we just dont know how to interpret much of it lol.
Also......I don't think i've seen so many MI's taken in a single sol as this one.
Posted by: Jeff7 Nov 26 2005, 05:17 PM
Maybe they're checking for changes in dust deposition over a period of time?
Even that seems an odd way to do it though, and not very effective. Wonder if someone just forgot a command when programming the sequence.
Posted by: Sunspot Nov 26 2005, 05:26 PM
We've been at this site for about 3 days, and the IDD hasn't been deployed yet which seems a little unusual to me, its normally deployed almost immediately. Maybe those images were intended to see if there was any reason why it waas stuck
Posted by: OWW Nov 26 2005, 06:39 PM

I don't think so. The reason they took those front hazcam pics is that the IDD is supposed to do its stuff. And who needs 33 MI-pictures of the same area for an inspection?
I think the computer sees some restriction for the arm and therefore doesn't move it. Either that, or the arm is stuck for some reason.
Let's wait and see what happens after the weekend.
Posted by: Cugel Nov 27 2005, 02:36 PM
Even more MI pictures came down.... all the same.
On the forward hazcam pictures of yesterday you can see some small position changes in the arm. But the pictures of today show no movement (let alone deployment) of the arm at all. I think we can 'officially' declare an emergency situation here.
Start speculating about the value of this mission without the IDD?
We still have pancam and MiniTes of course.
Posted by: Bill Harris Nov 27 2005, 02:53 PM
The mission is valuable. Oppy still has mobility and the Haz-, Nav- and Pancams. We've simply misplaced our handlens and scratch-plate. There may be a solution to this problem, but for the time being, the arm be stuck...
--Bill
Posted by: akuo Nov 27 2005, 04:24 PM
A bit early to declare emegency without any info from JPL. It might be a simple sequencing error by the mission planners, after which they let Oppy be as she is for the weekend because of holidays and the weekend. Even if there was a problem, they probably wouldn't start debugging it until monday.
Posted by: RNeuhaus Nov 27 2005, 05:20 PM
The Oppy might have experienced any problems with the IDD and have performed a safety reset: SAFE MODE. After this reset, it will clear any software bug that might have stuck the arms and facilite the engineering rover to analyze the origins of the problem.
I don't think that the arms might have been broken because of any strike on the surface because the IDD is is proctected by the safety margin algorithm software. I think it so. It is logical to incorporate that software to MER in order to protect of the valuable instrument against any accident strikes on the surface.
Hope that won't ham to the instruments of the arm then.
Rodolfo
Posted by: Edward Schmitz Nov 27 2005, 07:41 PM
It is more likely a sequence problem than a hardware problem. If the arm didn't do what it was instructed to do, the sequence would have been aborted. Let's wait and see what JPL has to say before we get too worried.
Posted by: tty Nov 27 2005, 08:01 PM
On the other hand there have been a couple of glitches with Opportunity's IDD before, which might be due to hardware problems (cable fraying) (see Steve Squyres transcript). I suppose this would make JPL extra cautious before trying anything if there are problems. Having the IDD stick in the folded position would be bad, but not catastrophic. Having it stick in the deployed position would be much worse. 
tty
Posted by: CosmicRocker Nov 28 2005, 03:50 AM
I'm not sure what this means, or if it even means anything. I won't suggest this is anything significant, because I can't interpret a lot of the stuff in the pancam tracking reports. But I went back to the last sol when MIs were taken, Sol 649. There was an "unexpected sequence," but it seems to be associated with a front hazcam image. However, that image was from command sequence P1110, which is always for front hazcam shots of the IDD in action.
Can anyone else interpret the tracking report better than I can? Any ideas?
Posted by: BruceMoomaw Nov 28 2005, 04:27 AM
They have had a large number of rather mysterious computer resets recently on MER-B, according to Doug McCuistion. (Some of them seem to be associated with the Mini-TES, for which reason it is now infrequently used.)
Posted by: Tesheiner Nov 28 2005, 10:14 AM
According to the planned sequences, sol 655 would be dedicated to the Mossbauer Spectrometer, but once again the IDD is missing in the hazcam pics.
http://marsrovers.jpl.nasa.gov/gallery/all/1/f/655/1F186329694EDN64KCP1131L0M1.HTML
---
655 p1131.04 2 0 2 0 0 4 f_haz_idd_mb_doc_512x512x1bpp_vhigh
---
Posted by: Sunspot Nov 28 2005, 10:29 AM
We just have to accept that this far into the mission things are likely to breakdown  But loosing 4 science instruments at once is a major blow.
But loosing 4 science instruments at once is a major blow.
Posted by: Tesheiner Nov 28 2005, 11:05 AM
I'm of the opinion that this "hiccup" is related to a sequencing error.
But we (me at least) don't have enough information to be sure.
I think the best will be just to wait for some news update from JPL and/or Cornell.
Posted by: Toma B Nov 28 2005, 11:57 AM
Of course there is always a good side in this situation...
I know this might anger some of you guys...but if IDD arm is permanently stuck , then Opportunity will just have to drive a lot more...and maybe drive all the way to that awesome Victoria crater which is great isn't it? 
Posted by: Tesheiner Nov 28 2005, 01:27 PM
Someone at the "other" forum remarked that something similar happened to Spirit on sol 150.
Here is the MER status report about the issue: http://marsrovers.jpl.nasa.gov/mission/status_spiritAll.html#sol148
Spirit was back to business on sol 151, and finished observing Joshua and the science magnets with the tools on the instrument deployment device. After that, the rover was off, and successfully completed a 73-meter (240 feet) drive toward the Columbia Hills.
Posted by: Cugel Nov 28 2005, 01:42 PM
Here is the MER status report about the issue: http://marsrovers.jpl.nasa.gov/mission/status_spiritAll.html#sol148
Hope you're right, but how similar is similar?
Did Spirit take 56 identical MI images in a stowed position?
Posted by: Bill Harris Nov 28 2005, 01:45 PM
Thanks, Tesheiner, I seemed to recall an earlier anomaly but couldn't remember the details.
To confirm what we have assumed what we see, I found an MI image from Sol 002 taken with the IDD stowed; it shows the same objects in the field of view that we see now. The dust cover was open, so the image is clearer (I suspect that the dust cover now has a coating of dust). The right front wheel can be seen in the background as this image was taken before the wheels were unfolded into the working position.
Interesting to browse those first images...
--Bill
Posted by: Tesheiner Nov 28 2005, 02:45 PM
OT: Look how clean is that wheel!
Posted by: Bill Harris Nov 28 2005, 03:16 PM
OT^2 : But considering that the wheel has turned over 5000 times during 4Km of travel, it is quite unworn today!
--Bill
Posted by: Edward Schmitz Nov 29 2005, 01:12 AM
The difference in the previous anomoly is that the sequence aborted. In this case we have 50+ images of the rover. If the arm were simply stuck, it shouldn't have done anything else.
Something else is happening. I'm voting for poorly constructed sequence.
ed
Posted by: edstrick Nov 29 2005, 08:17 AM
Note that this problem has occurred during the 4 day Thanksgiving Holiday Weekend in the US. I assume they parked both rovers at nice outcrops and planned LONG Mossbauer integrations and the like... basically a 4 or 5 day pre-programmed sequence so people could have most of the weekend off.
Posted by: Toma B Nov 29 2005, 08:54 AM
 AAAARRRRGGGHHHH!!!!!!
AAAARRRRGGGHHHH!!!!!! So is that waisting precious time or what...nobody looked at raw images , nobody to react because they are on holiday?
I'm not trying to start another "They deserve a rest once in a while" discusion , just thinking how many of you guys would sacrifice your holidays so that you can be in control of vehicle on Mars...I would...
Yes I know that it's not "just sit back and drive" but these guys are so privileged few who can DRIVE ROVERS ON ANOTHER PLANET...I would sell my soul to &$*#@ and work 365 days a year , without salary or food to have their job...are they looking for rover drivers?
Posted by: Enrique Bunbury Nov 29 2005, 09:30 AM
OMG!
 xDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDD
xDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDD
Posted by: edstrick Nov 29 2005, 10:35 AM
Uh.... (imagined conversation)
Spouse to Rover Driver: "Either you figure some way to drive that (expletive deleted) thing over a clifF, or I'm getting a divorce. 90 days is one thing, but nearly two years and no end in sight, I'va HAD IT!"
It's not as though they were sitting there doing nothing.. It's just a decidedly unfortunate time for a glitch.
Posted by: Bill Harris Nov 29 2005, 10:48 AM
Send JPL a resume', apply for the job...
Jet Propulsion Laboratory
4800 Oak Grove Drive
Pasadena, California 91109
United States Of America

Posted by: Toma B Nov 29 2005, 10:59 AM

Reminds me of my wife...
"Stop spending so much time on http://www.unmannedspaceflight.com/index.php? forum or else...."
Posted by: mike Nov 29 2005, 04:02 PM
Women like attention. In particular, they like undivided attention into perpetuity for all eternity.
Posted by: elakdawalla Nov 29 2005, 06:51 PM
You joke, but check out this message that arrived in my inbox two weeks ago. Most of us are sadly too old (or too foreign
) for this opportunity, but I'll bet we know some people who aren't. It's not rover driving but I'll bet you could meet some rover drivers as an intern on MRO...The program is an outstanding opportunity for science and engineering students to contribute to current Mars Flight Projects, and become part of the next generation of scientists.
Mars Flight Project Interns will work at the NASA Jet Propulsion Laboratory ( Pasadena, California ) directly with leading Mars scientists and engineers on the Mars Reconnaissance Orbiter (MRO) mission (http://marsprogram.jpl.nasa.gov/mro/). Initial Internships will run for a period of 6 months - from March 2006 to September 2006, on a full-time basis, with compensation for time/labor and relocation.
Opportunities include working with scientists on instrument calibration, science research, and aerobraking.
Internship eligibility requirements include being a student in good standing at an accredited university or college and U.S. citizenship or legal resident. The preferred education level for this internship program is junior or senior undergraduates or first or second year graduate students. University concurrence by department chair and an advisor recommendation will be required. Selection criteria will include (1) scholarship (GPA and publications) and experience; (2) education and career objectives and scientific interest; and (3) coursework. Internships are open to all students without regard to race, color, religion, national or ethnic origin, age, marital status, sex, military service, sexual orientation, or non-disqualifying disability. Additional Internship Program and Application information is available at http://www.sop.usra.edu/mars_intern/.
Regards,
Jeff Cardenas
USRA Program Manager
In regards to what may be an anomaly happening over a holiday, you can be sure that there are rover drivers on duty AND that they were taking a good look at what was going on (if it was an anomaly). There are just not any quick fixes for anomalies, holiday or no holiday. If there really is an anomaly they have to have a lot of people feel their way very slowly through what might have caused the problem, and how to test their theories through new sequences of commands and images and then work out a solution. Just remember how long they were stuck in Purgatory Dune. Be patient! We are SO lucky to have these images released so fast so that we can sit here on this forum and speculate about whether there might be an anomaly or not. If this were nearly any other mission, we'd never have seen those pictures, and wouldn't know what was going on for weeks or months, if ever.
--Emily
Posted by: odave Nov 29 2005, 07:17 PM
Ah, if only I had seen an e-mail like that back in 1989....
Posted by: Toma B Nov 30 2005, 11:05 AM
Is there any news on that stuck IDD arm???
Notice that last Steve Squyres Mission Update was on October 24, 2005...
Posted by: mars_armer Nov 30 2005, 02:47 PM
Here's the information I have. At the beginning of the unstow sequence, the IDD tripped the circuitry that senses a motor stall (high current). The trip happened almost immediately after the azimuth motor started, which strongly suggests the arm is not physically jammed. (In that case, it would wind up before stalling.)
Hopefully it was just a glitch, such as a momentary current spike, but it takes a little while to sort out these things from a distance. To me, it seems unlikely that there is a permanent problem with the arm.
Posted by: ElkGroveDan Nov 30 2005, 03:52 PM
I was thinking the same thing but for me it would have been 1986. I even lived in Southern California at the time. JPL would have been a 20 minute commute from my parents house.
Posted by: mike Nov 30 2005, 04:45 PM
You could always go back (or just go, if it's the first time) to school. I'm tempted myself, but you know, I want to do everything..
Posted by: Bill Harris Nov 30 2005, 05:20 PM
>Ah, if only I had seen an e-mail like that back in 1989....
In 1976 I was just out of college and landed a job as a "senior administrative intern" inspecting sewers for the county. Yep, work as a geotechnical grunt with a title...
--Bill
Posted by: odave Nov 30 2005, 06:00 PM
Yep, JPL would have been a dream job for me. No regrets though, I still got to work with robots - they're just not as glamorous as these fly-boys/girls we talk about here.
Thanks for the IDD update, mars_armer.
Posted by: dot.dk Dec 1 2005, 12:38 AM
The Pancam tracking site indicates some diagnostic being done tosol!
659 p1157.01 0 0 0 0 0 0 idd_debug_hazcam_lossless_512x1024_subframe_pri_27
659 p2626.02 0 0 0 0 0 0 pancam_sky_radiance_thumbs_L457R247
659 p2900.03 0 0 0 0 0 0 microscopic_imager_health_check_image
659 Total 0 0 0 0 0 0
Posted by: Edward Schmitz Dec 1 2005, 01:08 AM
Thanks for the IDD update, mars_armer.
I've always wanted to work for JPL, too. But now I'm working for Raytheon/SBRS who built the Mini-TES, TES and THEMIS instruments, so I'm pretty excited about that. We also had a visit from Phil Christensen. I have been meaning to write here about that but I just haven't had the time.
But I was in the highbay at JPL with the rovers while they were being assembled. That was the thrill of a lifetime! I was about 30 feet from one of them. I'll never know which one.
ed
Posted by: Sunspot Dec 2 2005, 12:30 AM
Still no sign of the IDD :
http://207.7.139.5/mars/opportunity/forward_hazcam/2005-12-01/1F186695196ESF64KCP1157R0M1.JPG
MI picture:
http://207.7.139.5/mars/opportunity/micro_imager/2005-12-01/1M186695242EFF64KCP2900M1M1.JPG
Posted by: Tom Tamlyn Dec 2 2005, 02:28 AM
Yesterday the Planetary Society posted one of its excellent MER status reports.
http://planetary.org/news/2005/1130_Mars_Exploration_Rovers_Update_Spirit.html
The report quotes Albert Haldemann, rover deputy project scientist, as stating on November 29 that both rovers are in "good health."
This of course doesn't negate the possibility that JPL is keeping an emerging problem under its vest for now, but it's something.
TTT
[edit start] P.S. Whoops! whatonmars.com has just recorded a JPL Opportunity update that discusses the stalled arm.
http://whatonmars.com/?q=node/778
I continue to be impressed (depressed?) by how unnecessarily complex and cryptic the jpl MER site is. I tried several times to find this update starting with http://marsrovers.jpl.nasa.gov/home/index.html, and failed each time.
Posted by: Toma B Dec 2 2005, 06:49 AM
So it's hardware problem this time...
OPPORTUNITY UPDATE: Stalled Motor, Stowed Arm - sol 649-660, Dec 01, 2005:
"...This time, a shoulder-joint motor that is needed for unstowing the arm stalled, and the arm stayed stowed. In subsequent sols, engineers worked to narrow the range of possibilities for the cause of the stall. Among the remaining possibilities is that, after working more than seven times longer than originally planned, the lubrication is degrading...."
I had that same problem yesterday...finaly I find updates (The Mission>Rover Update) but I had to go to sitemap to do it....
It's that "*"Spirit and Opportunity One Martian Year Anniversary"*" part of MER home page that's just a little bit on the wrong place...earlier there was direct link to the updates...
Sorry about my english...

Posted by: CosmicRocker Dec 2 2005, 08:39 AM
Thank you, Toma B. I finally found the lost updates with your help. I suspected it was a problem caused by the "One Martian Year Anniversary."
http://marsrovers.jpl.nasa.gov/mission/status.html
I noticed two more "unexpected sequences," recently. I wonder what that means. I think they should move the rover to jostle the arm, and then try again.
Posted by: Tesheiner Dec 2 2005, 09:43 AM
Imho, those "unexpected sequences" mean just that an actually executed sequence ID could not be found on a file containing the list of all planned sequences.
list file /home/mersci/pan/B/ops/Sol_all_seq_list.txt)
Sol Seq.Ver
--- ---------
659 p1157.01
659 p2900.03
I remember seeing that same thing for a navcam post-drive panorama (<...searching on my notes...>, here! Oppy, sol 630), and my conclusion is that the sequence was actually planned but missed on the "description file".
Edited: More troubleshooting sequences planned for sol 600...
---
660 p1157.02 2 2 0 0 0 4 idd_hazcam_LOCO_512x1024_SF_pri27
660 p1157.02 2 2 0 0 0 4 idd_hazcam_LOCO_512x1024_SF_pri27
660 p1157.02 2 2 0 0 0 4 idd_hazcam_LOCO_512x1024_SF_pri27
...
660 p2900.03 1 0 0 1 1 3 microscopic_imager_health_check_image
660 p2900.03 1 0 0 1 1 3 microscopic_imager_health_check_image
660 p2900.03 1 0 0 1 1 3 microscopic_imager_health_check_image
Posted by: Bill Harris Dec 2 2005, 12:36 PM
I suspected that the IDD problem was a balky motor. Heck, at my age, my shoulder joint actuator is getting creaky, so I can sympathize. They'll work up a solution, though: after all, they've got a three-legged dog climbing mountains over at Gusev...
--Bill
Posted by: Tesheiner Dec 2 2005, 01:01 PM
Sol 660 MI's are available.
No movement again...
Sol 659: http://nasa.exploratorium.edu/mars/opportunity/micro_imager/2005-12-01/1M186695242EFF64KCP2900M1M1.JPG
Sol 660: http://nasa.exploratorium.edu/mars/opportunity/micro_imager/2005-12-02/1M186783597EFF64KCP2900M1M1.JPG
Posted by: Vladimorka Dec 2 2005, 01:13 PM
There is some slight movement, but enough just to confirm the inability of the motor to move :-(
Posted by: Tesheiner Dec 2 2005, 01:27 PM
An animation with the five MI pics taken until now.
|
Posted by: odave Dec 2 2005, 03:21 PM
I'm not up on lubricants - is the suspected degradation a function of use or age or both? Has Oppy done more IDD work than Spirt, thus putting more "wear" on the lubricant?
Posted by: djellison Dec 2 2005, 03:36 PM
I imagine it's much like the Spirit FR wheel issue - just one of those things that happens after some use, but isnt predictable. Unfortunately, there's no 'backwards' to running a joint, so perhaps some higher watermarks for current limits on the motor will help the problem, as perhaps will heating the hell out of it to redistribute grease hopefully (didnt work with Spirit's wheel) , but as with all the actuators and motors on the rovers, they're getting old.
Doug
Posted by: tfisher Dec 2 2005, 04:01 PM
Playing "what if" with the worst case scenario: if the instrument depolyment arm is permanently stuck, what does that mean for Oppy? First, the mission would continue to operate, for at least as long as Spirit stays largely functional, or as long as the rovers stay mobile, whichever lasts longer. Squires said as much in his interview. For workable instruments, however, they would be down to cameras and Mini-TES.
I wonder what it would mean for power consumption. Do they have a way of killing power to the full arm, and would that be a significant savings when it isn't in use anyway? Suddenly if the Mini-TES is the only instrument besides optical cameras, preserving it from the threat of deep sleep becomes more important, I would think.
I hope our amazingly durable martian friend finds a way to bounce back from this problem, like it has from all others so far!
Posted by: odave Dec 2 2005, 04:04 PM
I guess if we do lose the IDD, it's better to lose it stowed than deployed.
Posted by: odave Dec 2 2005, 04:12 PM
Hmmm...if they can't free the arm with higher motor current limits, could they spin the RAT brushes while stowed to give the IDD some jiggling? Sounds risky, but it might help in a last-resort situation...
Posted by: Redstone Dec 2 2005, 04:15 PM
Posted by: tasp Dec 2 2005, 04:20 PM
Is it confirmed the fault is not with the protection circuit?
If the rover can be programmed to disregard the fault indication, could it verify the fault is in fact in the deployment motor/gear train?
Posted by: odave Dec 2 2005, 04:30 PM
Doug's suggestion of opening up the current limits is probably safer. If there really is a mechanical problem, you wouldn't want keep running the motor regardless, as it might burn up. It's a tough problem to debug at a considerable distance...
Posted by: Bill Harris Dec 2 2005, 04:45 PM
I'm not engineer, but I currently fly remote control aircraft with geared electric motors and in earlier incarnations worked with telescope gear drives. The IDD actuators are likely geared stepping motors and over time the gear train lubricants age and move away from critical points and, well, quit lubricating.
There are four actuators in the arm: a "shoulder joint" which provides left-right motion and near by is another joint which allows the arm to move forward-backward. The arm has two sections and the middle joint is like an elbow and that actuator provides more range of motion. The fourth actuator is like a wrist at the tool carrier and aligns the tool with the surface being thwacked. Of course, a fifth motor rotates the tool holder to select the proper tool.
Of the actuators, I'd figure that the first left-right shoulder joint is least critical and it could be left in one position and hthe arm might be stowed in a non-standard position without it.
I'm sure that there'll be a workaround...
--Bill
Posted by: ElkGroveDan Dec 2 2005, 06:56 PM
Among the remaining possibilities is that, after working more than seven times longer than originally planned, the lubrication is degrading...."
If this is the problem then it certainly didn't occur suddenly. I am forced to wonder if they haven't noticed balky performance of that joint. Have there been current spikes during it's operation? Or can they even track that sort of thing? It would sure help to watch for similar problems on Spirit and other similarly lubricated joints on both rovers.
Posted by: odave Dec 2 2005, 07:28 PM
Something is moving in these two FWD Hazcam frames.
http://qt.exploratorium.edu/mars/opportunity/forward_hazcam/2005-12-02/1F186783443ESF64KCP1157L0M1.JPG
http://qt.exploratorium.edu/mars/opportunity/forward_hazcam/2005-12-02/1F186783562ESF64KCP1157R0M1.JPG
This looks like a left-right motion to me, which would be produced from the azimuth/shoulder motor - correct?
Are they getting a little motion before the stall now?
Or is that not part of the IDD?
Posted by: akuo Dec 2 2005, 07:37 PM
http://qt.exploratorium.edu/mars/opportunity/forward_hazcam/2005-12-02/1F186783443ESF64KCP1157L0M1.JPG
http://qt.exploratorium.edu/mars/opportunity/forward_hazcam/2005-12-02/1F186783562ESF64KCP1157R0M1.JPG
Yeah, something is moving - our point of view. Those are from left and right hazcams :-P
(L in the 4th last letter of the filename tells its the left hazcam, R is right)
Posted by: odave Dec 2 2005, 07:41 PM
[Homer]
D'OH
[/Homer]
Posted by: jamescanvin Dec 2 2005, 10:41 PM
I think I'm right in saying that the joint that has the problem (the shoulder) is the one with the stuck heater, right?
This would mean that the joint has had a lot more heating than the one on Spirit and what it was designed for. Could be responsible for possible problems with lubrication or any number of other unforseen things.
Or maybe not, just idle speculation...
James
Posted by: RNeuhaus Dec 2 2005, 10:55 PM
Long time ago, when Oppy was inspecting inside the Endurance Crater, it had problems with a night with heating switch . It were drawing too much current so it was turned off during night sleeps. So Oppy has spent many days with deep sleeping mode without any heating for IDD.
Then, it might have accelerated the aging process of lubrication parts in joint arms. Otherwise, Spirit has undergone less often as deep sleep than Oppy so Spirit's joint arm is still working and is lasting longer than Oppy.
I am afraid if that problem is due to lack of lubricant on the joint arms. Then, there is no available solution to that unless "someone" is able to fly to where is Oppy to drip some valuable lubricant on the arm joints.
Rodolfo.
Posted by: dvandorn Dec 3 2005, 05:01 AM
"mmmmrrrrllll mmmmcccnnnn."
"What did she say?"
"I think she said 'oil can'!"
Oppy is in a place where she can accumulate rust without ever getting wet...
-the other Doug
Posted by: Toma B Dec 3 2005, 09:59 AM
Tom Tamlyn , CosmicRocker...looks like our criticism has been noticed by MER site moderators...
Updates are back where they used to be...

|
BTW it's just one more proof that NASA/JPL guys are watching this forum...if someone had any douth...
Posted by: Toma B Dec 3 2005, 10:01 AM
I have just one more question:
Why are they staying in that one place??? They are unable to unstow IDD arm ( at least for now) so why arent they do one thing that they can do with $400M robotic vehicle on Mars
..DRIVE!!!!
Maybe they will find a way to fix this problem once but for now staying in that one place is, despite of that wonderful outcrop , waist of time
isnt it?
Posted by: djellison Dec 3 2005, 01:03 PM
Because they're sat right infront of some fantastic layering which they want to investigate.
Doug
Posted by: Toma B Dec 3 2005, 02:55 PM
I know that, but consider how many fantastic "rocks","layerings","outcrops" are ahead of us...
There is one only 20-30 meters away...then there is that Victoria crater we all want to see...some of us in this lifetime...
Woud it be souch a terrible los if we skip this one?
Toma B.
Posted by: djellison Dec 3 2005, 03:04 PM
It's the same argument that's been had a thousand times. Yes - it's nice to make progress, but yes - one has to take whatever science is infront of you because the rover may not wake up tomorrow.
For all we know - driving might worsen the IDD situation. The IDD may not even be properly parked, and driving could cause irreperable damage.
Yes - it looks like there are some nice outcrops ahead, but we already have one right infront of us - that we are already 'at' and already poised to investigate, with routines for the IDD already written. I can see the case for driving on, but I can see why there
1) may be reasons that we can't drove on
2) are good reasons to stay put till the IDD is fixed, or declared unuseable.
Doug
Posted by: sranderson Dec 3 2005, 07:34 PM
There is one only 20-30 meters away...then there is that Victoria crater we all want to see...some of us in this lifetime...
Woud it be souch a terrible los if we skip this one?
Toma B.
If you were a geologist, investigating never-before-seen-by-man northern Arizona, would you spend your limited time investigating outcrops near Flagstaff, or would you try to drive your jalopy to the Grand Canyon, even though it may fail on the way? Where would you be more likely to get detailed information on geology from eons past?
Scott
Posted by: djellison Dec 3 2005, 07:40 PM
It look as though they're making the most of the pseudo 'down' time anyway - a full 360 Pancam mosaic, and a deck pan. They're already AT new terrain. Yes - it'd be nice to be doing 200m/sol and be at Victoria by Christmas, but sometimes things are just not possible.
Remember - for all we know, the IDD may have moved just enough to be considered un-parked and thus driving CAN'T be done. (infact, I think that's quite likely) - read the updates and it says that it stayed park on the first sol, then the second sol it recorded a small ammount of motion.
To make the anaology more appropriate, would you head out for the grand canyon to do geology without first checking you had your rock hammer and lens in your bag, and that your bag wasnt going to fall off the back of the truck on the way? Oh - and the Truck is parked on top of the first significant layering you've seen in 200 sols... get my point?
Yes - I can see why some would say "get moving" - but I can see why it may not even be possible ( so the argument is mute ) and I can see why they would want to look at what they're parked infront of.
Doug
Posted by: general Dec 3 2005, 08:37 PM

|
Posted by: mike Dec 3 2005, 09:56 PM
They have to see if they can get the IDD working at some point. Why would they just completely give up on it without trying all the possibilities? Once they've tried everything they can think of to make the IDD work again, I'm sure they'll move on and do whatever they can (and periodically see if they can get it working again beyond that).
Posted by: Decepticon Dec 3 2005, 10:20 PM
I figured out the real problem. Something is stuck under the arm.
Posted by: tasp Dec 3 2005, 10:36 PM
{how'd that get there?}
Posted by: ElkGroveDan Dec 3 2005, 10:41 PM
You win the prize again -- somebody tell Fifth Star or whatever his name was.
Posted by: edstrick Dec 4 2005, 08:03 AM
IF... big if.. let's hope not... they can't get the arm back in operation, the mission methodology changes to an essentially purely remote sensing operation. They drive to a target and do multispectral images and Mini-TES. Overall travel rate might increase by 50%, and the nature of observation/experiment objectives changes a fair bit.
Posted by: Cugel Dec 4 2005, 10:03 AM
Suppose the risk of moving the arm and then getting it stuck in a stretched position is so big, management decides to leave it where it is now. Would that actually render the IDD completely useless? Would it still be possible to move the arm in the up/down direction and rotate the instruments head? If so, losing the movement in the x-direction can be compensated for by driving the rover right over the target. Of course this would mean a great limitation in the targets that it can investigate, basically only those that you can roll over are now within reach. But something is better than nothing, as an old Chinese saying goes...
Also, from an engineering point of view, it is very interesting to see how this vehicle slowly degrades. Lessons for next missions (manned and unmanned) can be learned by just watching which components fail and in what order. So, I wouldn't kill the mission too soon but rather stretch it as far as it goes (can talk to us).
Posted by: vikingmars Dec 4 2005, 06:38 PM
Well... Even with no IDD, we have a (i) spacecraft that can move & (ii) able to do a lot of imaging and observations, (iii) with a TES working for which we can still make some kind of rock abrasion with the wheels...
Anyway, better than a Viking Lander !
Posted by: Jeff7 Dec 4 2005, 07:47 PM
And really, if the rover becomes a mobile camera platform, well hey, we've got Hubble, whose main mission is simply to take pictures. These things can still do a lot of work, even if it is "just" taking pictures.
Seems like lubrication is a big issue. It nearly paralyzed one of Spirit's wheels, and who knows, it might be an issue with Opportunity. Someone mentioned that 1) Opportunity has endured a lot more cold nights than Spirit due to its deep-sleep mode at night, and 2) it did a lot of IDD work in Endurance. Just during the trip down the slope into the crater, it made a lot of RAT holes.
Posted by: Toma B Dec 5 2005, 07:31 AM
Weeelll....
Even if they find a way to fix IDD arm I guess it will not be used as much as before...
Maybe they will be gratefull to "Lady Fortuna" that IDD stoped working while stowed because this way they can still do some science with Opportunity...
BTW does anybody knows how much times IDD has been "Stowed-Unstowed"? (100 times or so?)
Posted by: RNeuhaus Dec 5 2005, 03:02 PM
One solution might be good is that Oppy try to approach to the Mogollon rim where there is somewhat hard wall (aprox 1.6 meter tall). So Oppy must go with its own forward traction and put its arm against the wall and at the same time, turn on the motor to try to retract it.
That is the additional help force from the wheels tractionn to permit in overcoming the initial hardest friction to retract to a safe position before roving. After that, I don't think that IDD might be useful anymore.
The cold weather leads to wear sooner the lubrication. A good leason is to design wheels and movil parts not be so dependent of lubrication by using small diamond balls with some synthetic lubrication that can last thousands kilometers and can tolerate a very low temperature with a very low "W").
Rodolfo
Posted by: Bill Harris Dec 5 2005, 04:39 PM
News update:
http://www.jpl.nasa.gov/missions/mer/daily.cfm#Opportunity
--Bill
Latest Opportunity Update
Stalled Motor, Stowed Arm
Opportunity Status for sol 649-660
Release Date: 12/1/05
Opportunity drove 43 meters on sol 649 (Nov. 20, 2005) and then bumped 10 meters to an outcrop for work with its robotic arm (instrument deployment device) over the Thanksgiving holidays. Opportunity's commands for sol 654 (Nov. 25, 2005) included unstowing the arm to begin using the tools on it for examining the layered outcrop that the rover had driven to three sols earlier. The arm is always stowed during drives. This time, a shoulder-joint motor that is needed for unstowing the arm stalled, and the arm stayed stowed. In subsequent sols, engineers worked to narrow the range of possibilities for the cause of the stall. Among the remaining possibilities is that, after working more than seven times longer than originally planned, the lubrication is degrading. One possible fix would be to increase the duration of the allowed motor start-up, to overcome the increased initial friction. The first diagnostic activity for the arm was performed sol 659, where a very small motion was recorded. Future diagnostic activities and continuing analysis will be performed to further characterize the shoulder-joint motor in upcoming sols.
As of sol 659 (Nov. 30, 2005), Opportunity has driven 6,502 meters (4.04 miles).
Posted by: SigurRosFan Dec 5 2005, 05:44 PM
Bill: Note Toma's post (#46)
http://www.unmannedspaceflight.com/index.php?showtopic=1735&view=findpost&p=29540
Posted by: Reckless Dec 5 2005, 08:23 PM
Hi Guys
I don't know if it's just a coincidence but the last time both rovers successfully used their microscopic imagers was on the same day 26th November(at least that is when images came down on exploratorium)
maybe some new stowing sequence delivered to both rovers about that date could have caused the problem?
Any ideas?
Reckless
Posted by: djellison Dec 5 2005, 08:33 PM
An MI healthcheck image has been scheduled for Spirit on the pancam traking site for a couple of sols - so I wouldnt read anything into it - I think it might well be a comparison image to go "right,we know spirit's IDD is parked, what does the IDD show there....now what does the oppy image look like...." as a secondary visual gauge of the IDD's exact position - probably down to a sub millimeter accuracy I would imagine. Then - they'll be able to either
a) Set off in the knowledge that the IDD is properly parked and work on the issue while coveirng ground
or Know they need to fix the issue right now as it isnt parked and thus they cant drive
Know they need to fix the issue right now as it isnt parked and thus they cant drive
Comparing the two
http://qt.exploratorium.edu/mars/spirit/micro_imager/2005-12-05/2M186997776EFFAJW6P2900M1M1.JPG
http://qt.exploratorium.edu/mars/opportunity/micro_imager/2005-12-03/1M186870279EFF64KCP2900M1M1.JPG
It's clear that Oppy's IDD isnt parked in the same position as Spirit's - and thus it may be that it's not parked at all, or it's parked 'enough' to allow driving
That's my take on it all anyway.
Doug
Posted by: RNeuhaus Dec 5 2005, 09:26 PM
http://qt.exploratorium.edu/mars/spirit/micro_imager/2005-12-05/2M186997776EFFAJW6P2900M1M1.JPG
http://qt.exploratorium.edu/mars/opportunity/micro_imager/2005-12-03/1M186870279EFF64KCP2900M1M1.JPG
It's clear that Oppy's IDD isnt parked in the same position as Spirit's - and thus it may be that it's not parked at all, or it's parked 'enough' to allow driving
That's my take on it all anyway.
Doug
The difference between two pictures, the ones of Spirit, the background image is, I seems, of surface land (stones on the mountain) and the ones of Oppy is on the sky (around Oppy has no high lands) but I am not sure of this. It is because, the upper of image there is a shadow line, I am not able to figure out of this. The center stick is of the arm. I seems that the Spirit's arm has a semi-wear scotch. The Oppy case has no scotch sticking on the arm.
Rodolfo
Posted by: mars_armer Dec 5 2005, 10:17 PM
I haven't heard anything since Friday, but here's an update based on some inside information.
1. Opportunity's IDD is in a halfway-unstowed configuration. The arm unstows in four moves. The first move (apparently completed) raises the elbow toward the roof above it, in order to release a hook. The second move (not completed) is a joint 1 (azimuth) move that results in the elbow end moving forward, while the turret disengages its stow feature. The third and fourth moves get the arm in a neutral pose in front of the rover.
2. The arm itself doesn't appear to be mechanically hung up at either the elbow or the turret. The problem is in the motor of joint 1, which turns slightly, but stalls before even one motor revolution is completed. (The motor is a DC brush motor with magnetic detents. It fails to get out of the first detent.)
3. The team is experimenting daily on the arm, starting with parameter changes like
"stall persistence" (how quickly the circuitry shuts down the motor). They have not yet upped the current to the motor, but that should come soon. So far, the symptoms do not have an easy explanation.
In the worst case, if joint 1 can't be budged, the arm can be restowed because that action does not involve joint 1. In the meantime, I don't think the arm is in a configuration which is "officially" safe to drive. I also don't think they can easily experiment on joint 1 when the arm is stowed. So you may as well get used to this spot for a little while longer.
Posted by: helvick Dec 5 2005, 10:23 PM
Nice update mars_armer. Mixed news but it's nice to see that the team are being thorough.
Patience is in order folks. I quite like the view to be honest, she could have been stuck in far less interesting spots.
Posted by: Bill Harris Dec 5 2005, 10:48 PM
Ditto what Helvick said. Oppy is doing a LOT of nice Pancams of wonderful subjects.
--Bill
Posted by: Sunspot Dec 6 2005, 02:02 AM
Oh well............. at least we have something interesting to look at this time.
Posted by: mars_armer Dec 6 2005, 02:18 AM
More news today, and it's not too bad. A likely explanation for the problem is that one of the two motor windings is open (possibly the stuck open heater is a partial cause for this). It's not inconceivable that the motor could be operated on just one winding, so don't give up yet.
Posted by: Edward Schmitz Dec 6 2005, 02:19 AM
Why would they need to use Spirit as a reference? They have the engineering units on the ground for that.
ed
Posted by: Jeff7 Dec 6 2005, 04:37 AM
The engineering units haven't been working in a Martian environment for over a year.
Posted by: dvandorn Dec 6 2005, 09:01 AM
So, Oppy's endgame begins to play out... It's obvious that her IDD, if it can be made to work again, only has so many deploys left in it.
As Steve Squyres said in one of his many public speeches since the MERs landed, near the beginning of the mission, they would "whip out the arm" any time they got close to anything that looked even remotely interesting. But now that the rovers are getting older, the MER team is getting more cautious using things like the IDD, which could wear out and stop working at any time.
The arm can only be deployed a relatively few more times. The question now becomes, when and where?
I think the MER team needs to make some hard decisions. Do we continue to work up the interesting bedding and mineralogical differences we're seeing at the Erebus rim, or is there enough more to be gained by arriving at a locale like Victoria with a functioning IDD that would justify the risk of a mad sprint?
It would be very, very hard to sprint through the expanse of sporadically exposed bedrock that lies between us and Victoria without giving in to temptation and stopping to investigate. But, but, but -- can we deploy the arm 20 more times? Ten? Five? Two?
We just don't know. And we probably *won't* know until we rudely discover that the remaining number is zero.
IDD deploys may have just become the coin of the realm at Meridiani. Let's hope (and trust in a bit of luck) that we can spend it wisely.
-the other Doug
Posted by: Toma B Dec 6 2005, 09:25 AM
Maybe they should save it for Victoria, if we ever get that far....
Question:
What would happen if the IDD arm was fully unstowed when brakedown occurs...
Could Opportunity drive backwards dragging it behind him?
Posted by: Sunspot Dec 6 2005, 11:27 AM
http://www.pasadenastarnews.com/news/ci_3282301
Posted by: Tesheiner Dec 6 2005, 11:39 AM
Thanks for the link, Sunspot.
I would like to remark the following sentence:
Posted by: djellison Dec 6 2005, 12:29 PM
It's moved ever so slightly..
http://qt.exploratorium.edu/mars/opportunity/micro_imager/2005-12-03/1M186870279EFF64KCP2900M1M1.JPG
http://qt.exploratorium.edu/mars/opportunity/micro_imager/2005-12-05/1M186695172EFF64KCP2900M1M1.JPG
Doug
Posted by: dot.dk Dec 6 2005, 01:01 PM
What do you mean when you say it is "open"?
And why would the heater be responsible for this?
Posted by: Bill Harris Dec 6 2005, 01:28 PM
> one of the two motor windings is open (possibly the stuck open heater is a partial cause for this).
I'm not trying to second-guess mars_armer, but I'd suppose that, since it is a brushed motor, one pair of the brushes is not making good contact with the commutator. Since the heater had stuck open and they had to disabel it, this problem may be cold related.
--Bill
Posted by: Burmese Dec 6 2005, 01:57 PM
So it looks like they may work to get that joint extended at any cost, then leave it at a suitable position and just work the other motors to position the instruments. Obviously, they will disable the code that would otherwise not allow the rover to move if it senses that the arm is extended.
Posted by: dot.dk Dec 6 2005, 02:20 PM
Just to be sure. It is the joint that moves the arm in the azimut direction (left/right)?
Posted by: RNeuhaus Dec 6 2005, 02:23 PM
The troubled joint is of No. 1, the ones which extend and retract the arm. The joint 2 handles the azimut which you mentioned is still workable.
Rodolfo
Posted by: Bill Harris Dec 6 2005, 02:55 PM
I think that RNeuhaus has it wrong.
Ths problem joint is Joint 1, which is an azimuth joint.
From mars_armer's Post #92:
"The first move (apparently completed) raises the elbow toward the roof above it, in order to release a hook. The second move (not completed) is a joint 1 (azimuth) move that results in the elbow end moving forward, while the turret disengages its stow feature."
I interpret "raises the elbow" as an altitude movement, and "a joint 1 (azimuth) move" is clearly an azimuth movement.
--Bill
Posted by: mars_armer Dec 6 2005, 03:05 PM
And why would the heater be responsible for this?
I meant "open" in the electrical circuit sense. The motor has two redundant windings, and one of them now does not allow any current flow. This could happen if a wire was broken or if the brushes failed to make contact. The stuck heater causes the shoulder joint to get extra hot overnight, and the increased thermal stresses could possibly have accelerated the process that led to this failure.
Bill has it right. The shoulder is azimuth/elevation. Joint 1, which has the problem, is the azimuth, which moves the arm left/right.
One of the design rules for the arm was that if any one joint fails at any time, the arm can be posed (using the remaining joints) so that all parts are above the rover's belly pan. In principle, you could drive this way. In fact, if the arm was extended and the azimuth joint failed, you still could tolerate the failure of a second joint and still be able to raise the arm for driving. So the prospect of a deployed arm with a dead azimuth joint isn't too bad.
Posted by: odave Dec 6 2005, 03:11 PM
...Trying to put a picture to these words. From this image on the http://hobbiton.thisside.net/rovermanual/ website, I marked what I think are the joints we're talking about, with Joint1 having the problem.

|
Doug: Not sure if this image is verboten on the board, if so, please delete to keep us out of trouble.
Posted by: djellison Dec 6 2005, 03:46 PM
I've seen that image all over the place - it's certainly not from the should-have-that-pdf-cad-document. No problems from my end.
Doug
Posted by: mars_armer Dec 6 2005, 03:54 PM
Well, not quite. There are some good diagrams and pictures in this document:
http://www.asi-space.com/company/TechnicalPapers/Actuator_Development_for_IDD.pdf
Posted by: RNeuhaus Dec 6 2005, 03:59 PM
Ths problem joint is Joint 1, which is an azimuth joint.
From mars_armer's Post #92:
"The first move (apparently completed) raises the elbow toward the roof above it, in order to release a hook. The second move (not completed) is a joint 1 (azimuth) move that results in the elbow end moving forward, while the turret disengages its stow feature."
I interpret "raises the elbow" as an altitude movement, and "a joint 1 (azimuth) move" is clearly an azimuth movement.
--Bill
Oppss...the joint 1, -the shoulder- has two functions instead of one, elevation and azimuth. Sorry for the bad interpretation.
Rodolfo
Posted by: Bill Harris Dec 6 2005, 05:56 PM
>There are some good diagrams and pictures in this document:
>Actuator Development for IDD
Good reference, mars_armer. That was good reading, there was a great deal of R&D that went into the IDD. At the end of that document was a very telling on the working life of the IDD, and this is probably the key to this problem:
===
This was deemed acceptable because the mission
duration is only 90 Martian days and the lifetime
number of output revolutions for any actuator, including
testing and ground operations, will be no more than 500
at the close of the mission. Much of the design
philosophy behind the IDD and its actuators takes this
into account: harmonic gears are often operated at
torques approaching their momentary peak torque
rating; ball bearing stresses during operations are
reasonably high (up to 1.79 MPa, or 260 ksi), possibly
subjecting the Bray lubricants to pressure cycle
degradation.
===
My first thought was that the IDD could be unstowed, the arm placed in a useful azimuth position and left alone, and the IDD operated with the elevation (elbow) actuators without latching the arm in the stowed position. But it seems that although the static loads on the IDD are such that the "detents" on the motors are adequate to lock it in use, the live (dynamic) loads are too much and the arm will shift in elevation as the Rover moves and the arm must be locked down.
We'll see though.
--Bill
Posted by: BruceMoomaw Dec 6 2005, 09:48 PM
The problem is indeed with the azimuth joint -- at the moment, the arm isn't swung out far enough for the instrument head to clear the little shelf on which it sits in the stowage position. So, to contact the suface with it again, they MUST swing it out at least a little bit in azimuth -- but the MER press conference by Squyres and about four other people that I attended yesterday at the AGU Meeting made it clear that, if they can do so, they will resume using it in what might be called the "gimpy" mode, and that includes driving with the arm that way.
As for the nature of the problem, they consider it unlikely that it's a mechanical jam -- both because of the really high gear ratio (8000 to 1, albeit in two stages), and the fact that the azimuth motor isn't drawing as much power as it should when it stalls. It looks like some kind of electrical problem -- maybe with the motor itself (windings or brushes), or maybe with the power controller circuitry. No comments from them, unfortunately, on what corrective measures they may now try to take, although they made it clear that there are some.
Before we get too persnickety about this, however, we might keep in mind that the damn thing has worked perfectly for 7 times beyond its design life.
Posted by: Burmese Dec 6 2005, 10:04 PM
Press conference yesterday, eh? Any other tidbits?
I'm guessing they will try to deploy the arm by applying a lot of power to the winding that is still fully functional. I wonder what are the consequences if the second winding suddenly starts to draw power and add in its' own torque? Like maybe spinning your tires and suddently getting full traction and overshooting?
Posted by: mars_armer Dec 6 2005, 10:22 PM
Yes, the fix would involve providing more current and voltage to the motor, by changing parameters in the motor control electronics. They do need to consider possible ramifications if the open winding "heals". You definitely don't want to harm any electronics that are common to the other joints.
I think I misspoke when I talked about two windings. I actually now understand there are 7 windings. They are seeing about 2x normal resistance in the motor, and I don't completely understand how this is consistent with a single open winding. But I think it makes sense to the motor experts.
Posted by: Bill Harris Dec 7 2005, 03:23 AM
Per the .pdf file on the IDD, the motors used are the Maxon RE020 brushed motor. The Maxon motors website is http://www.maxonmotor.com . There was no listing for the RE020, but I'm sure that the RE family of motors share common characteristics.
Maxon motors are also used in the driving wheels.
They appear to be serious hardware*.
--Bill
*translation= "serious hardware" means a well-designed and well-built motor.
Posted by: BruceMoomaw Dec 7 2005, 07:34 AM
"Any other tidbits?"
Yep; I got pretty clear descriptions of what they intend to do with both rovers next -- and a couple of very intriguing debates among scientists which I'm trying to get a little more background on right now. (Alas, I really can't tell you guys about any of this yet.)
Also, a little more on Mars Express than has been announced in the press releases yet.
Posted by: Marslauncher Dec 7 2005, 01:10 PM
Yep; I got pretty clear descriptions of what they intend to do with both rovers next -- and a couple of very intriguing debates among scientists which I'm trying to get a little more background on right now. (Alas, I really can't tell you guys about any of this yet.)
Also, a little more on Mars Express than has been announced in the press releases yet.
Awwww Bruce you are such a tease!!!
simply not fair hehe insider info was what this board is all about , we wont tell .... honest
John Cooke
Posted by: djellison Dec 7 2005, 01:14 PM
Actually - to say "I know something but cant say" is a bit, well, in the UK we'd call it 'Bad sport'. If you know something but cant say - then DON'T say so - and when you CAN say...DO. Otherwise it just smacks of "ner ner ne nerrrr nere - I know something you dont know"
Doug
Posted by: BruceMoomaw Dec 7 2005, 01:53 PM
Well, hell, Doug, I was ASKED if I had any more tidbits. What was I supposed to say? "No, I didn't learn a goddamn thing at the meeting that we didn't all already know?"
Posted by: Bill Harris Dec 7 2005, 01:58 PM
Calm down, big fella. If it were a "really can't tell" situation, then it weren't a tidbit...
Nothing new imagery-wise on the IDD at Exploratorium. But there are now an R2,R7 images of The Slump, so it may be possible to conjure up a color stereo pair of this feature.
--Bill
Posted by: Edward Schmitz Dec 7 2005, 03:35 PM
I am very happy to hear that as the rover ages, the team is prepared to implement plans that are, shall we say, not so graceful. I would expect them to do what it takes. Somehow, I doubt that driving with the arm partially extended is all that dangerous. But if it does break, I expect them to drag it to Victoria crater!
To the last breath!
ed
Posted by: mike Dec 7 2005, 04:07 PM
You could just ignore the question, though in that case people might imply that you therefore knew something (if they were keeping close track), unless I suppose you never answered any questions.. Sometimes you just can't win.
Posted by: Burmese Dec 7 2005, 04:25 PM
I assumed that a 'Press Conference' meant a public forum so any information divulged at it was for public consumption. If it was a press-only deep background' affair, well, I guess we wait a while for details.
Posted by: Airbag Dec 7 2005, 10:43 PM
From reading the IDD development document, it appears the motors were very sensitive to the initial startup current at low temperatures. Now I realise that it is probably not just a startup current issue, but perhaps it might be worth experimenting with the motor movements when the motor in question is as warm as possible. So perhaps in addition to the heater, point Opportunity is such a way that the moter gets direct late afternoon sun (as it is below the solar panels during the middle of the day). That way both the rover and the ground have warmed up and the joint is warmed by direct sunlight too.
Anybody know which way Opportunity is facing? It seems like roughly S-SW to me, in which case a small turn to W-SW might be better. Of course, that may not be good for antenna purposes...
Turning the rover may be out though with the IDD not fully stowed.
Airbag
Posted by: Phil Stooke Dec 8 2005, 04:14 AM
So... Bruce hears something but can't reveal it, and Doug says he should keep quiet about it. Oh, but Doug, it's just so ###&$*% difficult to do that! I, for instance, am bursting with things I'd like to blab about, but I'm not allowed to... yet. Oh Pooh!
Phil
Posted by: edstrick Dec 8 2005, 10:31 AM
Bruce: "(Alas, I really can't tell you guys about any of this yet.)"
Actually, he CAN tell us, but he'll have to neuralyse us afterwards!
Posted by: Toma B Dec 8 2005, 01:15 PM
Tomorrow will be 3 weeks since Opportunity stopped
IDD arm isnt working but why arent they use what still works : WHEELS
Posted by: akuo Dec 8 2005, 01:28 PM
Since you keep repeating it, I guess the rest of us will too. The mission is about science, not driving.
If the IDD arm is busted, there are reasons to stop Oppy right here and concentrate all effort on Spirit instead.
Posted by: djellison Dec 8 2005, 01:38 PM
I've already said - until they've fully understood the IDD's health and status - it would be a bad idea to drive, they could do more damage.
Doug
Posted by: Bill Harris Dec 8 2005, 01:47 PM
Bravo, well put. Oppy is doing science here; look at the hundreds of Pancam images of this wonderful location. IMO this spot is important because it is the transition between the North Erebus/Endurance units and the Mogollon/Victoria units. Look back at the imagery from the drive, drive, drive times, such as just before Purgatory and the recent detour around the "North Erebus Dunefield". Interesting to watch things zip by, but they were zipping by.
Victoria is a worthy goal, but there is so much to see along the way.
--Bill
Posted by: Edward Schmitz Dec 8 2005, 03:34 PM
http://www.unmannedspaceflight.com/index.php?showtopic=1801
Posted by: sranderson Dec 8 2005, 03:46 PM
Victoria is a worthy goal, but there is so much to see along the way.
--Bill
Yes there is good science here, but what geologist would want to spend weeks and weeks investigating a 5 foot outcrop in a streambed in Kansas, cataloging every layer, depicting every minute detail of every ancient thunderstorm, when instead, he could walk down the Grand Canyon and capture an understanding of a much bigger picture. He could find out what happened over eons of time, not just one miniscule piece of time, and realize a great deal of basic knowledge of the past that can serve as a structure for future discoveries.
There is limited time. There is not enough time to investigate everything to the nth level of detail. You have to perform triage and decide where you are most likely to find wholy new things that could revolutionize your understanding -- and where you will only likely find more of what you have already seen. To do otherwise is an irresponsible use of a once-in-a-lifetime Opportunity.
If the team I was working on three years ago building the Rover avionics had this same mindset of spending unlimited time looking at every detail -- for example if we had spent all of our time on making sure the labelling of the electronics boards was just perfect, or looking at each wire and trace for the slightest scratch, there would be no Rovers on Mars now.
I want the product of our labors to be used to find new discoveries. We have found much so far, but we are unlikely to find anything Mars-shaking at Erebus.
Here is the plan: Waste not one day. See if the arm can be made to work. Either way, drive to the Mogollon outcrop. Spend a few days there just to see if there is anything new. Climb out and head for Victoria. If you see anything _really_ new on the way stop for a couple of days. Explore Victoria as much as possible. Add 100 more feet to the Endurance stratigraphy.
Yes there is risk that we will fail to reach Victoria. Then we have nothing except drive images to the point where we stop. But we have to take the risk. To do otherwise is a waste of a chance to see back in time on Mars.
I am reminded of a quote from General Patton (revised): "What did you do with the great Opportunity Mars Rover, Grandpa? Well, we shoveled sh*t in Erebus."
Scott
Posted by: centsworth_II Dec 8 2005, 05:26 PM
Why not drive?
As I understand it, although the arm is not extended, it is not properly stowed for driving either. And this is definately as good a place as any to get a super-detailed panorama of the ubiquitous sulfate pavement.
Posted by: mars_armer Dec 9 2005, 01:08 AM
Good news today. If I read the report correctly, the azimuth motor successfully turned about 4 turns backward, then forward, then backward again. No faults. This is very promising. It suggests that they understand the failure cause (broken winding) and have a workaround.
Posted by: dot.dk Dec 9 2005, 01:21 AM
Cool!
So what does this mean?
It can actually turn despite a broken winding, but they haven't yet tried to turn it more than those four turns?
Crosses finger for Oppy
Posted by: mars_armer Dec 9 2005, 01:56 AM
It can actually turn despite a broken winding, but they haven't yet tried to turn it more than those four turns?
Yes, they change parameters in the motor control to take the higher resistance into account.
The reason for only four turns is that they are just taking baby steps until they are sure they understand the situation. Tomorrow they will do similar moves but at different times of day (cold, hot) to see if the broken winding "heals" at cold temperature. Engineering data will come down over the weekend and be analyzed on Monday.
Patience is still required, but at least we can expect a good outcome.
Posted by: BruceMoomaw Dec 9 2005, 01:59 AM
Scott
What an interesting coincidence -- except for not stating how long they'll spend trying to fix the arm, this is exactly the plan announced by the MER team at their AGU press conference. (By the way, I learned to my pleased surprise that my two short pieces on the MER and Mars Express talks at the AGU meeting will be published in just a few days on "Astronomy's" website, rather than in its print version -- making them vastly more up to date, and freeing me to leak a little more to you guys in advance.)
Posted by: lyford Dec 9 2005, 06:16 AM
"I shiver with antici......
pation!"
And thanks mars_armer for your updates...Oppy's days may be numbered, but that number appears to be still growing at this point.
Posted by: CosmicRocker Dec 9 2005, 07:02 AM
Wonderful! So, they were able to get well past that first detent. Thanks, 'armer.
sranderson: Thanks for that interesting perspective. After reading Steve Squyre's fascinating discussions of the different points of view among the scientists and the engineers in his recent book, I can't help but ask...Are you an engineer, or a scientist? Your perspective seemed nicely balanced between the two points of view.
...and Bruce: I can't wait to see those articles. You will remind us when they become available, won't you? In the meantime, feel free to continue leaking. We don't mind.
Posted by: RNeuhaus Dec 9 2005, 02:28 PM
The time utilization of MER is in the fight of the power between the enginneers and scientists/geologists. The engineering team want to put everything in a total control no matter of the time until the problem is already nailed down, develop solutions and test it until it is workable or not. On the other side, the scientists and geologist are becoming impatient with the time, they want some time for any advancement such as to approach to Mogollon rim that is very close, between '|' 90-100 meters to take pictures or MiniTES only meanwhile the MER is stopped there, the engineers take their diagnostic control.
It is a matter of sharing the spare time between them.
Rodolfo
'|' redit for correction. The distance is not of 20-30 meters but 90-100 meters. Rather far...
Posted by: Cugel Dec 9 2005, 02:53 PM
Exactly!
You mean they should spend their spare time drinking beer together, don't you?
A well proven solution for many conflict situations!
Posted by: sranderson Dec 9 2005, 03:05 PM
So, they were able to get well past that first detent. Thanks, 'armer.sranderson: Thanks for that interesting perspective. After reading Steve Squyre's fascinating discussions of the different points of view among the scientists and the engineers in his recent book, I can't help but ask...Are you an engineer, or a scientist? Your perspective seemed nicely balanced between the two points of view.
...and Bruce: I can't wait to see those articles. You will remind us when they become available, won't you? In the meantime, feel free to continue leaking. We don't mind.
Cosmic: I am an engineer -- but I have a science background (my first selection of a major was engineering physics, but ended up with a degree in electrical engineering and computer science). My brother majored in geology, and I've been on quite a number of field trips with him. I was responsible for some of the electronics on the Cruise Stage and Lander, with some involvement on the Rover electronics.
So the bottom line is that I am an engineer with a passion for getting the most possible out of this mission. The Rovers age every day.
Scott
Posted by: Sunspot Dec 9 2005, 04:57 PM
http://qt.exploratorium.edu/mars/opportunity/forward_hazcam/2005-12-09/1F187313926ESF64KCP1157L0M1.JPG
It's moving a bit
Posted by: djellison Dec 9 2005, 05:04 PM
I've looked thru all those similarly sized FHAZ's and not seen signs of movement to be honest.
Doug
Posted by: Sunspot Dec 9 2005, 05:22 PM
ooopssss.... how embarrassing...i compared a pic from the left and right hazcams.. rather than two left ones. I got too excited lol
Posted by: AlexBlackwell Dec 9 2005, 07:25 PM
rather than two left ones. I got too excited lolhttp://www.space.com/missionlaunches/051209_rover_arm.html
By Tariq Malik
Staff Writer, Space.com
posted: 09 December 2005
01:06 pm ET
Posted by: RNeuhaus Dec 9 2005, 07:45 PM
According to the most recent picture is that the IDD position is still much higher altitude than the wheels. So, the IDD is not going to drag on the surface and I expect that the software has been modified to take a new default measurements of position of the IDD. Otherwise, try transverse as much as possible on sand since the surface is softer and it does make less vibrations than tranversing on the outcrops to the rover that might cause any unforseen problems... It would be good if only the geologist say, oh no more outcrops...
Rodolfo
Posted by: Bill Harris Dec 9 2005, 08:47 PM
Here is a link to a tech catalog at Maxon:
http://www.maxonmotor.com/docsx/Download/catalog_2005/Pdf/05_Technik_kurzund_buendig_dc_24_25_e.pdf
This gives a good overview of the design of the motors used on the Rovers.
--Bill
Posted by: deglr6328 Dec 9 2005, 09:33 PM
So if I'm understanding this right, there are 9 separate windings on the motor and if you loose one, you can compensate by merely increasing the power to the remaining windings (thereby increasing their associated magnetic fields, making up for the lost force which would have been applied by the broken winding). If this is the case, won't increasing the power to the remaining windings significantly increase the risk of blowing yet another one? With each subsequent loss being exponentially more likely? If so, we can probably expect to see conservation of arm usage just like that of the rat.
Posted by: dot.dk Dec 9 2005, 09:55 PM
A new update from JPL:
http://marsrovers.jpl.nasa.gov/mission/status.html#opportunity
And it looks like they are making the most out of the wait time
At least this is not like Purgatory
Posted by: RNeuhaus Dec 9 2005, 10:41 PM
The future some rock and site names are of a mix of language: spanish, and english.
Informal names for targets examined in this vicinity by the panoramic camera include "Drake," "Chino Valley," "Bellemont," "Camp Verde," "Young," "Cherry," and "Paulden."
Chino : Chine
Verde : Green
Camp : Field (Campo, truncated name)
Chino Valley--> Valle Chino
Camp Verde --> Campo Verde (Green Field).
Those are funny spanish-english names...
The probable places are:
Valle Chino --> The same valley where is Oppy, between small dunes toward to Mogollon rim?
Camp Verde --> On the West side where there is an outcrop with dark stones?
Drake --> ?
Bellemont --> ?
Young --> ?
Cherry --> ?
Paulden --> ?
Rodolfo
Posted by: mars_armer Dec 9 2005, 11:08 PM
That's correct. It turns out that you have to double the power, since the broken winding prevents current from flowing through an entire side of the motor.
It's not necessarily that bad, but of course those are the kinds of questions that need to be answered. I believe that up to now the temperature excursions every night from the stuck heater have been much worse than those caused by operating the motor. Also, it takes some time for the motor to heat up, and they have a measurement of case temperature.
Regardless, you can be sure that arm usage will be a carefully managed resource in the future.
Posted by: Bill Harris Dec 10 2005, 04:24 AM
http://marsrovers.jpl.nasa.gov/mission/sta...tml#opportunity
Thanks for the update on the stalled IDD motor; Oppy has indeed been busy doing science and making a fantastic panorama.
--Bill
Posted by: BruceMoomaw Dec 10 2005, 06:27 AM
My article on the MER talks at the AGU meeting is now out on the "Astronomy" website ( http://www.astronomy.com/asy/default.aspx?c=a&id=3781 ). Unfortunately, they:
(1) ...trimmed it down so much in length that it contains virtually nothing you don't already know, except for their official plans for the next extensions of the two rovers' missions. There really weren't many interesting new MER discoveries unveiled at the meeting -- except for the emphasis by Squyres and several other speakers on the extraordinary diversity MER-A has found in the Columbia Hills rocks. But there were some very interesting talks by Brian Hynek, Nick Tosca and James Greenwood on possible interpretations of their findings. Since "Astronomy" didn't print my comments on these, I'll try to elaborate more soon in "SpaceDaily" -- or else here.
(2) ...committed one howler (which I've already complained about) by saying that MER-B has "a jammed right front wheel", which would be rather more serious than the actual jammed right front wheel steering motor.
Coming up in a day or two: my companion piece on the much more interesting Mars Express findings (and I wonder how they'll disembowel that one).
Posted by: Bill Harris Dec 10 2005, 12:27 PM
From Astromoney Magazine:
The solution broke down the basalt into sulfate salts mixed with loose silicate particles, along with little, hard hematite spherules. These spherules, or "blueberries," grew by chemical reactions in the sediment from basaltic iron dissolved in the acid brew.
Going slightly OT: you don't have "a strong solution of sulfuric acid in water", you have water that is acidic. Did acidic water weather the basalt, or did the water become acidic during the weathering process? Water is "the univeral solvent" and when in contact with the rocks of the aquifer it can and does pick up dissolved constituents such as sulfates, carbonates and metals. Groundwater can become acidic in this way; typically, the oxidation of iron sulfide yields hydrogen ions, sulfates and free iron. I'm sure that the groundwater on Mars is highly mineralized but I can't visualize vast pools of oil of vitriol.
Are you meaning to suggest that the blueberries weathered out of the basalt?
Back to our regular discussion: the Rover team will get this IDD problem quantified and nullified soon enough and Oppy will be on the road again. I'm still curious about the next outcrop...
--Bill
Posted by: lyford Dec 10 2005, 04:23 PM
Yes... as much as is spoken about Victoria, I feel more frustrated that great IDD targets are so close and we haven't been able to use the MI! And that next outcrop looks very interesting as well.... no need to go over the rainbow just yet.
But I have every confidence Oppy will http://www.unmannedspaceflight.com/index.php?showtopic=1735&st=60&p=29689&#entry29689 eventually.
Posted by: Bill Harris Dec 10 2005, 05:21 PM
Absolutely, Lyford. I've been drooling over these outcrops since last year and now that we're here it's "look but don't touch". That's unrequited geomorph!
<sigh>
--Bill
Posted by: dot.dk Dec 10 2005, 06:12 PM
It's moving!!
http://img275.imageshack.us/my.php?image=movement9rg.gif
Posted by: AlexBlackwell Dec 10 2005, 07:38 PM
Posted by: BruceMoomaw Dec 10 2005, 10:23 PM
Not just Squyres, but a whole parade of AGU speakers kept emphasizing how astonished they were at this. The explanation seems to be that giant impact events during the Noachian period when the Hills surface was first formed kept throwing material from all sorts of different locations -- covered with basalt of varying original compositions, and in some cases undergoing different degrees of aqueous (and acidic) modification -- into the Hills region. (Many of the Hills rocks are breccias made of different components that have clearly undergone different degrees of water modification.) As Squyres says, this is an indication that "ancient Mars' crust was of extraordinary complexity." MER-A has even found two or three small outcrops of what may be the same phyllosilicate clays that Mars Express is now finding from orbit:
http://www.agu.org/cgi-bin/SFgate/SFgate?&listenv=table&multiple=1&range=1&directget=1&application=fm05&database=%2Fdata%2Fepubs%2Fwais%2Findexes%2Ffm05%2Ffm05&maxhits=200&="P12A-04"
The main puzzle about the Hills at this point seems to be the central one of their existence: why are they still sticking up there, when most of Gusev's floor was eroded away by something and later covered by that flat, homogeneous flow of dry basalt? Were they originally sticking up even higher -- perhaps pushed up as part of an old crater rim within Gusev after they were originally laid down -- so that they remained higher than the rest of the crater's floor after the erosion that cleaned Gusev out?
http://www.agu.org/cgi-bin/SFgate/SFgate?&listenv=table&multiple=1&range=1&directget=1&application=fm05&database=%2Fdata%2Fepubs%2Fwais%2Findexes%2Ffm05%2Ffm05&maxhits=200&="P21A-0133"
(Unfortunately, due to money problems I wasn't able to hang around for the Tuesday morning batch of MER and Mars Express posters, some of which look damn interesting.)
Posted by: Sunspot Dec 10 2005, 11:45 PM
http://img275.imageshack.us/my.php?image=movement9rg.gif
LOL..... when I saw that thumbnail attachment... I thought you'd made the same mistake I made hehe. Good to see it REALLY is moving this time.
Posted by: CosmicRocker Dec 13 2005, 07:20 AM
So the bottom line is that I am an engineer with a passion for getting the most possible out of this mission. The Rovers age every day.
Scott
Scott: I just love this long-standing engineer/scientist debate.
I am a dyed-in-the-wool scientist, and my best friend is a similar kind of engineer. We have had this debate for several recent decades, much to the detriment of our friendship. On the positive side, I think we both have discovered that we have much to learn from one another. In the end, we both want to accomplish the same result, but we each find different problems to concentrate on. It all boils down to communication among people speaking different languages. Ooh, those were some fascinating abstracts, but I had to key in on that Squyres quotation. Geologists haven't often had the pleasure of seeing rocks that were likely created in the early stages of formation of a planetary crust. Our imaginations are going rampant with images of partially molten crust, incipient volcanism, random large impacts, and an early atmosphere, laden with water and other other primal volatiles.
Ask another geologist and you'll get another picture, painted in different colors.
The rovers are giving us these tiny little windows into brief geologic moments of the ground truth of the planetary-forming processes. I'm giddy with delight, but I doubt we'll figure out all the details with so little data.
It became apparent to me long ago that I would never have the opportunity to leave our planet, but these two little rovers have given me the next best thing.
I want to see more of those clays.
Posted by: akuo Dec 13 2005, 01:03 PM
From the pancam tracking site for tosol:
671 p1131.04 0 0 0 0 0 0 f_haz_idd_mb_doc_512x512x1bpp_vhigh
671 p1214.05 0 0 0 0 0 0 front_haz_ultimate_4bpp_pri15
671 p1219.02 0 0 0 0 0 0 front_hazcam_loco_pri_56
671 p2600.07 0 0 0 0 0 0 pancam_tau
[...]
671 p2936.02 0 0 0 0 0 0 mi_open_minloss2_LUT3_veryhigh
[...]
I suspect they will try extending the IDD? 1st line for the arm extended and MI selected as tool? There is a large bunch of MI images sequenced too.
Posted by: Marz Dec 13 2005, 04:23 PM
Thanks for the newsflash! I'm keeping my fingers crossed....

Posted by: SFJCody Dec 13 2005, 06:44 PM
A welcome sight:
Posted by: RNeuhaus Dec 13 2005, 06:50 PM
Good detailed picture. It is the neatest IDD showing picture! I would like to confirm about the IDD parts which are the following:
1) Back : RAT
| 2) Right lower: Microcospic Imager
| 3) Down: Alpha Particle X-Ray spectrometer
| 4) Left: Moussbauer spectrometer
| 5) Right Upper: Wrist actuator
| 6) Middle Upper: Turret Actuator
Rodolfo
'|' re-edited for completing the unsecure parts.
| conclusion: At that time, Oppy was performing a Moussbauer analysis.
Posted by: general Dec 13 2005, 06:50 PM
What a wonderful birthsol present!
Posted by: mhoward Dec 13 2005, 06:56 PM
Another one:
http://nasa.exploratorium.edu/mars/opportunity/micro_imager/2005-12-13/1M187751018EFF64KCP2936M2M1.JPG
http://nasa.exploratorium.edu/mars/opportunity/micro_imager/2005-12-13/1M187751331EFF64KCP2936M2M1.JPG
Posted by: Nix Dec 13 2005, 07:29 PM
Nice to see you back RAT !
Nico
Posted by: dilo Dec 13 2005, 08:52 PM
...and now...
_ __|_____

Posted by: DEChengst Dec 13 2005, 08:59 PM
WOOHOO!
YES
*dances around Opportunity in joy*
Posted by: dot.dk Dec 13 2005, 10:07 PM
This is a very welcomed sight!!
Thank you MER engineers! You do amazing thing with these vehicles!
It seems no matter what breaks you'll find a workaround
Now Victoria Beacons!
Posted by: lyford Dec 13 2005, 11:27 PM
Beautiful to see it not only moving, but doing what it was supposed to do! This means they were able to aim it accurately as well! Yippee!
Please pardon my irrational exuberance.
Posted by: Joffan Dec 13 2005, 11:46 PM
YEEEEEEhaaaaaaaaaa! Good job MER team!!!
Posted by: Bill Harris Dec 14 2005, 12:40 AM
Absolutely Wonderful. I'm giddy with anticipation...
--Bill
Posted by: jabe Dec 14 2005, 12:40 AM
Any word on what the problem was? They must have guessed the exact cause since they seemed to have gotten the exact pics they wanted
jb
Posted by: dot.dk Dec 14 2005, 02:08 AM
jb
Probably some broken windings in the shoulder joint motor. They just increased the current to that motor to get it to move.
Posted by: CosmicRocker Dec 14 2005, 05:29 AM
I'm one happy camper...
Congratulations, engineers.
Posted by: CosmicRocker Dec 14 2005, 06:41 AM
I was wondering where to put this comment, but now that the arm is back in business and taking MIs, the Strange MI Images thread is probably as good a place as any...
Are we seeing http://www.google.com/search?q=define%3Abotryoidal bluberries in that concretionary cluster of baby blueberries, visible in the upper left of this image?
I suspect we have been seeing a variety of more irregular concretionary forms in this area of more varied mineralization.
I'm tempted to describe some of it as http://www.google.com/search?q=define%3Abaroque, in spite of the fact that that term has many implications.
Posted by: djellison Dec 14 2005, 10:14 AM
LMFAO - I gave a talk on Opportunity last night - and said "right now they're running their first proper science sequence with the arm since the trouble started, but I had to leave a little too early to find out if it worked"
And it HAS worked. Thank GOD for that!!!
Doug
Posted by: Reckless Dec 14 2005, 11:44 AM
It's great to see the IDD working again also I wonder if the botryoidal Heamatite has the concentric ring structure that it often has on Earth.
Reckless
Posted by: Bill Harris Dec 14 2005, 04:39 PM
If Oppy does RAT this outcrop we'll hopefully see one of these "blackberries" in section. However, I'll speculate that the IDD will be used with more discretion in the future so we may be seeing _less_ MI and RAT but _more_ interesting ones.
--Bill
Posted by: Airbag Dec 14 2005, 06:17 PM
Steve Squyres mentioned on Monday afternoon's seminar at the Hayden Planetarium that they will probably lock the IDD's position with the "upper arm" in the extended postion so that the shoulder joint motor will not have to be used again. They will drive in this mode and there will be sufficient remaining degrees of freedom for the instruments to be used in a meaningful manner. He felt there was enough "locking" strength in the joint to allow driving in this mode (instruments tucked in towards the rover) given the relative benign terrain; this would probably not have been possible for Spirit.
He said that motor has two independent sets of windings; one of them is open circuit, most likely because that motor's heater has been stuck on as is well known of course. This motor has therefore experienced much greater termperature cycles every sol than the other motors (kind of ironic, really, getting too warm on Mars!).
Airbag
Posted by: Bill Harris Dec 14 2005, 07:02 PM
As I recall, these are thin-film heaters which put out 2.5W and are designed to keep the motor temperature above -70 deg (C or F??) whereas without the heater the minimum temp was expected to be -120 deg. Seems like they turn the heater off instead of letting it run contiuously. This is all from memory, but I suggest that although -70 deg is relatively warm, it still pretty darn cold!
--Bill
Posted by: Airbag Dec 14 2005, 07:14 PM
--Bill
During deep sleep, the heaters would be off, leading of course to the lowest temperatures. But then during daytime operation, the heater (as it is stuck on) would heat the motor to a higher temperature than the other joints, hence the larger temperature extremes for just that motor.
Airbag
Posted by: BruceMoomaw Dec 15 2005, 01:25 AM
http://www.space.com/missionlaunches/051214_opportunity_arm_updt.html :
" 'Were developing a mode for keeping the arm out in front,' Erickson said, adding that engineers are now studying various positions in which to stow the arm and ensure its continued use as a science tool. 'Well essentially stow it now by putting the instrument pack up over the rovers deck.'
"Erickson said more analysis and arm motor tests are planned in order to determine the best configuration for the arm during drives."
Posted by: Jeff7 Dec 15 2005, 02:09 AM
So I guess it needs a sling for the IDD. I think I saw an appropriate picture floating around the forums somewhere.
Use the RAT to drill a hole in the deck, and stick part of the IDD through it to hold the arm in place.
Posted by: Toma B Dec 15 2005, 06:54 AM
...and if there is no "cleaning event" for long time they could use brush to clean solar panels...it's like washing your back...only a bit harder....
Posted by: Bill Harris Dec 15 2005, 10:45 PM
Oppy is re-learning to use her IDD-- today's image shows that she positions well above the target getting set in x-y before dropping down in z (and into focus). IMO.
The target is the rock next to the mobile sand we saw last week, and the "blackberry patch" is on the left of the rock.
--Bill
Posted by: dot.dk Dec 17 2005, 01:59 AM
A new Opportunity Status update:
http://marsrover.nasa.gov/mission/status.html#opportunity
Seems like the shoulder joint is still acting up
Sol 671:
The first half of the mosaic completed as planned, but the arm sequence was halted after that due to a stall of the shoulder-joint motor.
Sol 673: The plan was to complete the microscopic-imager mosaic that was started on sol 671 and place the Mössbauer spectrometer on a target called "Williams." However, the shoulder-joint motor stalled once again.
Were these stalls even with the more current added to the motor?
If so, the future for the shoulder joint looks pretty bad.
Better get used to do work with only the other joints on the arm...
And if you look at it. The shoulder joint is probably the least important joint to loose, if you had to choose a joint on the IDD.
I would imagine it would be more difficult to use the arm if one of the elavation or elbow joints were lost.
So of all the joints, we lost the right one
Posted by: jvandriel Dec 20 2005, 01:12 PM
Here is the complete mosaic.
Taken with the MI on Sol 671 and Sol 677.
jvandriel

|
Posted by: Marz Dec 20 2005, 05:34 PM
Taken with the MI on Sol 671 and Sol 677.
jvandriel
Excellent mosaic!
This problem falls under the "dumb question" category, but is it possible to use frame-stacking on some of the pancam close-ups to create high-quality images that can be zoomed like a quasi-MI? I'd try this out with some of Oppy's latest images, but don't know where to start...
Posted by: Zeke4ther Dec 21 2005, 04:32 AM
http://marsrover.nasa.gov/mission/status.html#opportunity
Were these stalls even with the more current added to the motor?
If so, the future for the shoulder joint looks pretty bad.
No need to get into a panic
My guess the engineers would still be characterizing the motor, since the motor drive parameters have changed. Give it a little time and they will figure out how to use it
Posted by: edstrick Dec 21 2005, 10:40 AM
dot.dk: "...Were these stalls even with the more current added to the motor?..."
I believe so. But it's not necessarily bad news. I believe they're using barely enough power to move the arm, and sometimes it's not enough. They're going to creep-up on "just enough". They are at risk at frying <maybe> the other motor winding at higher voltages/currents so they don't want to use any more than they need to.
Posted by: alan Dec 27 2005, 03:43 AM
Sols stuck in Purgatory 484 - 446 = 38 ( left on sol 511 total sols = 65 )
Anyone want to start a new pool?
Posted by: CosmicRocker Dec 27 2005, 06:31 AM
Wow! How time flies.
They recently brushed the top of that rock, so they will probably RAT it next. It's the holidays and New Year's Eve is yet to come. I don't know if they have decided on an arm configuration they would travel with. I'll be both conservative and optimistic, and bet that Opportunity will move by Sol 690.
Posted by: general Jan 2 2006, 01:04 PM
http://www.spacedaily.com/2005/051230112116.fkpgjseh.html
:
"In late November a mechanical arm on Opportunity stopped working, as one of its key driving motors stalled. It took NASA engineers two weeks to get the arm operational, but they are still concerned that it might fail again.
"If it has failed, it will be a significant hit. It is the contact arm of the mission," Callas said.
He also said that part of the robot's directioning system was broken, but that it would not prevent NASA from directing the machine."
What is this "directioning system"?
Posted by: djellison Jan 2 2006, 01:07 PM
I cant think what it might be - IMU perhaps?
Doug
Posted by: dot.dk Jan 2 2006, 01:21 PM
What is this "directioning system"?
Wouldn't that be a different way to say steering motor?
Posted by: djellison Jan 2 2006, 02:50 PM
Ahh - yes - the FR steering actuator..
Doug
Posted by: jamescanvin Jan 16 2006, 02:22 AM
Something to look out for tosol:
New IDD stow position.
Posted by: Tesheiner Jan 16 2006, 09:36 AM
and THIS:
704 p1214.05 2 0 0 2 0 4 front_haz_ultimate_4bpp_pri15
These pics are usually associated to movements. The last time a "penultimate" shot was taken was on sol 651 i.e. when moving to the current site (64KC).
So I would say (hope) that today is driving day; maybe just a minimal move, for testing purposes, but moving anyway!
Posted by: akuo Jan 16 2006, 11:09 AM
A bit strange that there is no rear haz images sequenced, but I guess they have documented the surroundings around here accurately enough...
Posted by: djellison Jan 16 2006, 11:44 AM
I think it will probably just be a little 'back away' from where they are to image it with Pancam and TES the ratholes etc. No need for a RHAZ if that's all they do.
Posted by: Tesheiner Jan 16 2006, 04:48 PM
No movement.
Sol 704 (site/drive = 64KC): http://qt.exploratorium.edu/mars/opportunity/forward_hazcam/2006-01-16/1F190680237EFF64KCP1214R0M1.JPG
Posted by: dot.dk Jan 16 2006, 04:52 PM
But I think we are still missing some pictures from SOL 704 according to the http://marswatch.astro.cornell.edu/merweb/merweb.pl
At least this is the navcam_IDD_stow_workspace
http://nasa.exploratorium.edu/mars/opportunity/navcam/2006-01-16/1N190680183EFF64KCP1939L0M1.JPG
Posted by: Tesheiner Jan 16 2006, 04:54 PM
Definitely.
But, regarding *movement* those hazcams would be the last ones.
Posted by: mhoward Jan 16 2006, 05:01 PM
Looks like it's still deployed on the rock to me. Maybe there are more images to come. (Wishful thinking, probably.)
Posted by: Tesheiner Jan 16 2006, 05:18 PM
Yep.
Dot.dk already mentioned some missing navcams. They are already downlinked (per the tracking web) but their timestamps seems to be *prior* the hazcams.
http://nasa.exploratorium.edu/mars/opportunity/navcam/2006-01-16/1N190680183EFF64KCP1939R0M1.JPG
Posted by: akuo Jan 17 2006, 11:30 PM
Same sort of sequence for oppy on sol 706 as on sol 704:
706 p1214.05 0 0 0 0 0 0 front_haz_ultimate_4bpp_pri15
706 p1938.04 0 0 0 0 0 0 Navcam_IDD_doc
706 p1939.04 0 0 0 0 0 0 navcam_idd_stow_workspace
Maybe there was a minor error on sol 704 and the tasks didn't complete?
Posted by: Tesheiner Jan 18 2006, 08:58 AM
Maybe.
Another info for sol 704 on the tracking web is:
know, and if important, the PEL. update the SSF list
/home/mersci/pan/B/ops/Sol_all_seq_list.txt as appropriate)
Data products:
Number Number
Number Number Still not (yet)
Sol Seq.Ver Requested Created on Rover Created Description
--- --------- --------- ------- --------- ----------- -----------
704 p1201.03 4 0 0 4 front_haz_penultimate_1_bpp_crit16
704 p1214.05 4 4 4 0 front_haz_ultimate_4bpp_pri15
704 p1585.00 8 0 0 8 navcam_cloud_4x1_dwnsmp_RVRAz_calstart
704 p1938.04 4 0 0 4 Navcam_IDD_doc
704 p1939.04 8 8 8 0 navcam_idd_stow_workspace
704 p2600.07 6 6 6 0 pancam_tau
704 p2600.07 6 6 6 0 pancam_tau
Something *seems* to has been not executed on that sol, but while we don't have a new status report we can only make wild guesses.
Posted by: general Jan 18 2006, 05:45 PM
Does this look like a stowed arm?
http://qt.exploratorium.edu/mars/opportunity/forward_hazcam/2006-01-18/1F190865275EFF64KCP1214R0M1.JPG
Posted by: dot.dk Jan 18 2006, 06:41 PM
http://qt.exploratorium.edu/mars/opportunity/forward_hazcam/2006-01-18/1F190865275EFF64KCP1214R0M1.JPG
Sure does
Stow and Go baby!
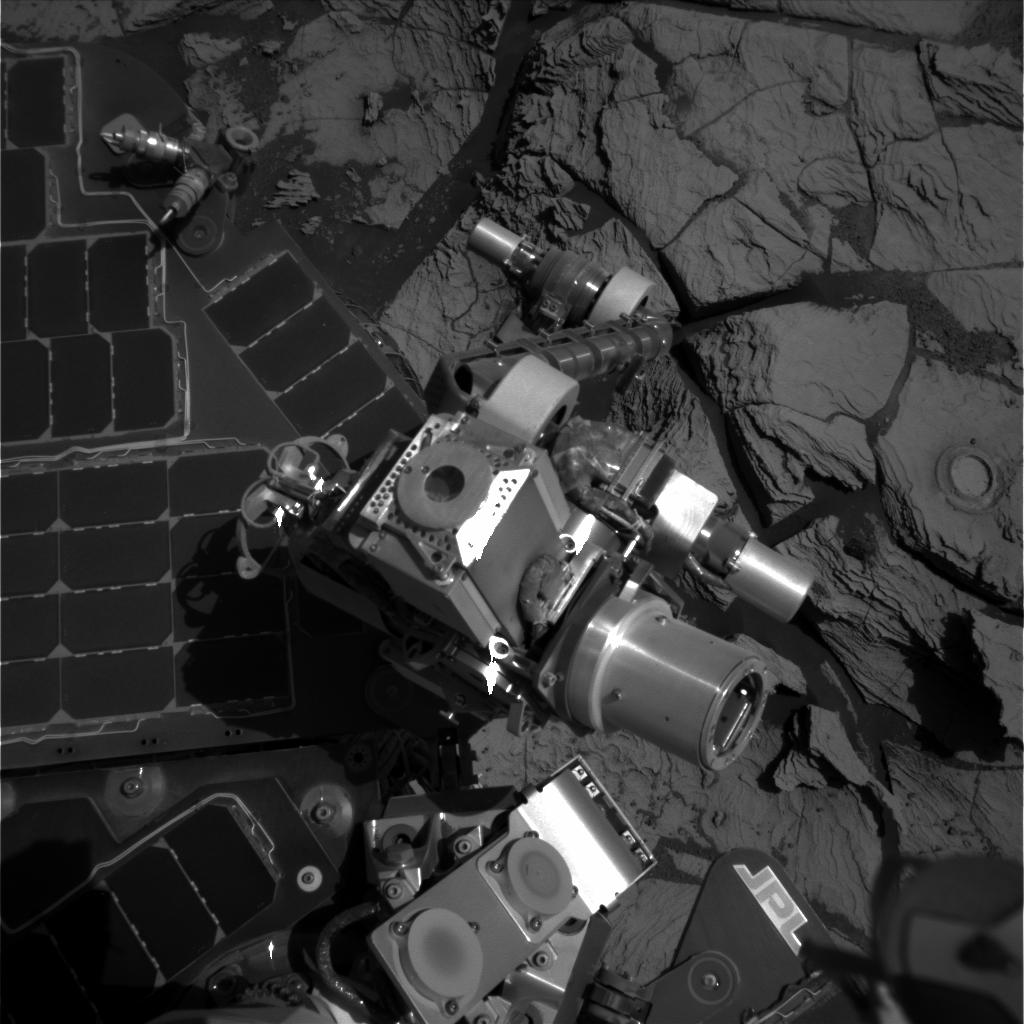
Looks just as I predicted


Posted by: Tesheiner Jan 18 2006, 06:53 PM
So... driving on sol 708?
(It's a guess)
Posted by: Rakhir Jan 18 2006, 10:08 PM
Stow and Go baby!
It's casting a shadow on a couple of cells.
Anyway, the effect should not be significant for the moment given the total surface of the panels.
Perhaps it could become in the future during the next power shortage phase ?
Posted by: RNeuhaus Jan 18 2006, 10:25 PM
Anyway, the effect should not be significant for the moment given the total surface of the panels.
Perhaps it could become in the future during the next power shortage phase ?
Not so much worrying since the MER has between 499 and 500 solar cells. Shadowing two cells mean a lost of 0.4% of power. Sometime, the shadow of MST and HGA are bigger than the stow IDD.
Rodolfo
Posted by: jamescanvin Jan 18 2006, 11:53 PM
Anyway, the effect should not be significant for the moment given the total surface of the panels.
Perhaps it could become in the future during the next power shortage phase ?
If power gets THAT critical we won't be driving so the arm could be unstowed.
Perhaps it could be angled to reflect a bit *more* sunlight onto the panels?
Posted by: jamescanvin Jan 19 2006, 02:39 AM
SOL 707 - (TOSOL!) - DRIVING ALERT!
707 p1212.08 0 0 0 0 0 0 front_haz_ultimate_2_bpp_pri19
707 p1214.05 0 0 0 0 0 0 front_haz_ultimate_4bpp_pri15
707 p1226.01 0 0 0 0 0 0 front_haz_penultimate_4_bpp_pri41
707 p1302.02 0 0 0 0 0 0 rear_haz_penultimate_4bpp_pri41
707 p1316.01 0 0 0 0 0 0 rear_haz_ultimate_4_bpp_pri41
James
Posted by: jamescanvin Jan 19 2006, 02:47 AM
Just a lilttle "bump" though.
But still.
Posted by: mhoward Jan 19 2006, 03:03 AM
But still.
It's the principle of the thing. After 56 sols without movement, I think getting off 64KC will deserve a major internet party.
Posted by: Tesheiner Jan 19 2006, 08:47 AM
Man, I'm eager to see other site id then 64KC.
Posted by: dot.dk Jan 19 2006, 09:15 AM
Let's sum this stay at Olympia up and compare it to Purgatory Dune
Purgatory Dune SOL 446 - 484
Stay at Purgatory: 38 sols
Olympia 651 - 707
Stay at Olympia: 56 sols
A longer stay, but afterall we got more science from this place than from Purgatory
Posted by: AndyG Jan 19 2006, 10:16 AM
True enough, but I bet the designing engineers (and therefore future rovers) will benefit more from the knowledge of Martian regolith mechanics gained at Purgatory. ;-)
Andy G
Posted by: mhoward Jan 19 2006, 05:48 PM
http://nasa.exploratorium.edu/mars/opportunity/forward_hazcam/2006-01-19/1F190953090EFF64KSP1214L0M1.JPG. HOORAY!!!!!
Update: switch back and forth between http://marsrovers.jpl.nasa.gov/gallery/all/1/n/706/1N190865227EFF64KCP1939L0M1.JPG and http://nasa.exploratorium.edu/mars/opportunity/navcam/2006-01-19/1N190952885EFF64KSP1938L0M1.JPG . I wonder if we will be getting some nice driving movies from this angle, while they watch the arm?
Posted by: Tesheiner Jan 19 2006, 06:24 PM
"A small step for a rover, ..."
Good bye, site 64KC!
Posted by: Toma B Jan 19 2006, 08:04 PM
Finaly!!!
Hurra!!!
2 months...........
Posted by: RNeuhaus Jan 19 2006, 09:02 PM
What is 64KC?
Rodolfo
Posted by: mhoward Jan 19 2006, 09:15 PM
Rodolfo
The site/drive code, as seen in every Opportunity raw image filename for the last two months. For example, 1F190865275EFF64KCP1214L0M1.JPG (
http://marsrovers.jpl.nasa.gov/gallery/all/1/f/706/1F190865275EFF64KCP1214L0M1.JPG).
Filename guide http://marsrovers.jpl.nasa.gov/gallery/edr_filename_key.html
Posted by: general Jan 19 2006, 09:15 PM
Vacation is over. It's back to work for Oppy.
Posted by: alan Jan 20 2006, 12:52 AM
I wonder if any of her joints creeked after sitting in one spot for so long.
Posted by: Tesheiner Jan 20 2006, 11:38 AM
It was already said that those structures seen on previous hazcam pics (well, in all sort of cameras and filters...) were delicate.

|
But what about these ones? It looks like the smallest touch could broke them.

|
PS: It's time to open a new thread, don't you think so?
Posted by: Bill Harris Jan 20 2006, 02:37 PM
One last question... we need to figure out precisely where the IDD tool cluster is contacting the solar panel and which tool is making the contact. I presume that it is not resting on a solar cell. This is for the 1/4 toy I'm making.
---Bill
Posted by: general Jan 20 2006, 03:00 PM
---Bill
re. reply 217 in this thread
Posted by: Bill Harris Jan 20 2006, 07:06 PM
RE: reply 217 shows generally where the IDD is parked, but I need to determine precisely where the IDD tool cluster is contacting the solar panel.
--Bill
Powered by Invision Power Board (http://www.invisionboard.com)
© Invision Power Services (http://www.invisionpower.com)