MSL statistics, Odometry progress and other figures |

  |
MSL statistics, Odometry progress and other figures |
 Mar 9 2014, 07:02 AM Mar 9 2014, 07:02 AM
Post
#76
|
||
 Senior Member  Group: Members Posts: 2492 Joined: 15-January 05 From: center Italy Member No.: 150 |
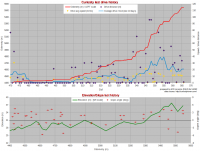
Update to Sol566/Mar,10
-------------------- I always think before posting! - Marco -
|
|
 |
 
|
|
|
Mar 13 2014, 06:16 PM
Post
#77
|
||
|
Senior Member Group: Members Posts: 2492 Joined: 15-January 05 From: center Italy Member No.: 150 |
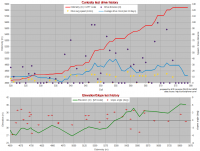
Short-term update to Sol579/Mar,23
-------------------- I always think before posting! - Marco -
|
|
|
|
|
|
|
Mar 26 2014, 01:56 PM
Post
#78
|
||||
|
Senior Member Group: Members Posts: 2492 Joined: 15-January 05 From: center Italy Member No.: 150 |
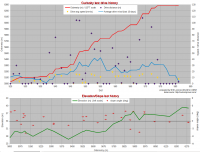
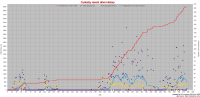
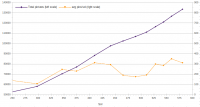
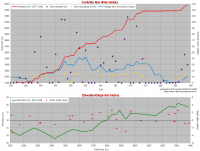
Major Odometry update in Joe drive log (+7.5% on the average, higher on last drives) so I updated both short and long-term plots below (picture plot is a bonus...):
-------------------- I always think before posting! - Marco -
|
|||
|
|
|
|||
|
Mar 27 2014, 01:54 AM
Post
#79
|
|
 Senior Member Group: Members Posts: 1465 Joined: 9-February 04 From: Columbus OH USA Member No.: 13 |
Do we have a "ground truth" on the official odometry to date from JPL?
-------------------- |
|
|
|
|
Mar 27 2014, 09:31 AM
Post
#80
|
|
|
Senior Member Group: Members Posts: 1465 Joined: 9-February 04 From: Columbus OH USA Member No.: 13 |
All right, someone tells me that as of sol 581 the odometer reading is 6029.095 meters. The total on my drive log is 6286, about 4% high. That's based on the rover position data at http://naif.jpl.nasa.gov/pub/naif/MSL/misc/icarrasco/ with some fudge factors applied.
Possible sources of error: 1) Not sure how "official" the NAIF data is, whether it has been corrected for wheel slippage, etc. 2) My code samples the rover position given by these files every second and sums up the distance from these short straight-line segments. Since the rover travels only a few cm/s that probably doesn't introduce very much error? 3) When the track as shown on my map deviates significantly from the Phil Stooke or JPL-reported positions, I apply a correction to make it line up better. Maybe that's where the greatest error lies, as it might relate to some warpiness of the HiRISE map, bugs in my mapping code, who knows. -------------------- |
|
|
|
|
Mar 27 2014, 09:53 AM
Post
#81
|
|
 Senior Member Group: Members Posts: 2428 Joined: 30-January 13 From: Penang, Malaysia. Member No.: 6853 |
QUOTE (jmknapp @ Mar 27 2014, 09:54 AM)  Do we have a "ground truth" on the official odometry to date from JPL? Not sure if this will help verify the data you received... The last JPL report I can locate is this one LINK This report was issued after the sol 546 drive.... QUOTE .......for a total odometry of 3.24 miles (5.21 kilometers) since its August 2012 landing..... |
|
|
|
|
Apr 1 2014, 03:04 PM
Post
#82
|
||
|
Senior Member Group: Members Posts: 2492 Joined: 15-January 05 From: center Italy Member No.: 150 |
While waiting for eventual further adjustments, this is the update based on current Joe's table:
-------------------- I always think before posting! - Marco -
|
|
|
|
|
|
|
Apr 1 2014, 03:55 PM
Post
#83
|
|
|
Senior Member Group: Members Posts: 2511 Joined: 13-September 05 Member No.: 497 |
Are you familiar with the coastline paradox? http://en.wikipedia.org/wiki/Coastline_paradox
There are so many error sources for odometry that it may not be physically meaningful to even discuss the "true" value. Even figuring out where the rover is at any given moment isn't free of ambiguity. I think you're doing a great job with the data you have. -------------------- Disclaimer: This post is based on public information only. Any opinions are my own.
|
|
|
|
|
Apr 1 2014, 04:10 PM
Post
#84
|
|
|
Solar System Cartographer Group: Members Posts: 10154 Joined: 5-April 05 From: Canada Member No.: 227 |
Odometry can also be reported in different ways. If Curiosity makes a 360 degree spin in place its wheels have moved 10 m but the rover hasn't moved at all. Which value do you use?
Phil -------------------- ... because the Solar System ain't gonna map itself.
Also to be found posting similar content on https://mastodon.social/@PhilStooke Maps for download (free PD: https://upload.wikimedia.org/wikipedia/comm...Cartography.pdf NOTE: everything created by me which I post on UMSF is considered to be in the public domain (NOT CC, public domain) |
|
|
|
|
Apr 1 2014, 09:05 PM
Post
#85
|
|
|
Senior Member Group: Members Posts: 1465 Joined: 9-February 04 From: Columbus OH USA Member No.: 13 |
QUOTE (mcaplinger @ Apr 1 2014, 10:55 AM) Are you familiar with the coastline paradox? http://en.wikipedia.org/wiki/Coastline_paradox Yes! Benoit Mandelbrot's book had a chapter titled "How Long is the Coast of Britain" and the answer was: infinite, if you use a small enough ruler. It's more important for me to keep the map position more or less right, because when it deviates I definitely start getting emails. And now the rover is poised to travel beyond the bounds of my initial HiRISE map tiles. I'm working to add another set of tiles--hopefully it'll be done before the rover moves much further, now just a couple hundred meters from the edge. "There be dragons!" -------------------- |
|
|
|
|
Apr 1 2014, 11:40 PM
Post
#86
|
|
|
Senior Member Group: Members Posts: 1465 Joined: 9-February 04 From: Columbus OH USA Member No.: 13 |
[
QUOTE (Phil Stooke @ Apr 1 2014, 11:10 AM) Odometry can also be reported in different ways. If Curiosity makes a 360 degree spin in place its wheels have moved 10 m but the rover hasn't moved at all. Which value do you use? The number above from Paolo doesn't include the turns, or visodom updates. For my part I take the position reported by SPICE for "MSL"--here is the call: spkezr_c("MSL",et,"MSL_TOPO",CORR,"MSL_LANDING_SITE",topostate,<) ; So that gives the the position of MSL (center of rover frame) in the local topographic coordinates relative to the landing site. The rover frame is centered between the middle wheels so I don't think turns in place would add to the total. This is from the frames file msl.tf: CODE Rover -Z side ("top") view: --------------------------- .-----. .-----. .-----. | | | | | | | | | | | `--|--' `-- Yr `--|--' `----------o- ^ -----o------' ..-.------- | ------. RSM || | | |--------. || | | |-------.| RA |`- <-------x | || RTG | | Xr HGA |-------'| -o---------|--------|o-| =====-o---------' | `-------------------' .----------o---------o------. .--|--. .--|--. .--|--. | | | | | | | | | | | | `-----' `-----' `-----' Zr is into the page. -------------------- |
|
|
|
|
Apr 2 2014, 01:37 AM
Post
#87
|
|
 Senior Member Group: Members Posts: 4246 Joined: 17-January 05 Member No.: 152 |
QUOTE (jmknapp @ Apr 1 2014, 10:05 PM) the answer was: infinite, if you use a small enough ruler. I'm sure you're not suggesting it Phil, but of course we can be pretty sure the rover hasn't moved an infinite distance in a finite time, unless it has one of those experimental warp drives...  But the point about resolution-dependence is well taken. Presumably if someone cared enough they could smooth the sampled path on some particular standard length scale and call that the path length. |
|
|
|
|
Apr 2 2014, 01:50 AM
Post
#88
|
|
|
Member Group: Admin Posts: 976 Joined: 29-September 06 From: Pasadena, CA - USA Member No.: 1200 |
QUOTE (jmknapp @ Apr 1 2014, 04:40 PM) ... The number above from Paolo doesn't include the turns, or visodom updates. ... The number I gave you *does* include VO updates (nut not turn in place commands). Paolo -------------------- Disclaimer: all opinions, ideas and information included here are my own,and should not be intended to represent opinion or policy of my employer.
|
|
|
|
|
Apr 2 2014, 09:11 AM
Post
#89
|
||
|
Senior Member Group: Members Posts: 1465 Joined: 9-February 04 From: Columbus OH USA Member No.: 13 |
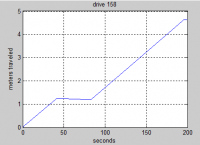
QUOTE (fredk @ Apr 1 2014, 08:37 PM) Presumably if someone cared enough they could smooth the sampled path on some particular standard length scale and call that the path length. The SPICE data appears to be smoothed piecewise linear--here's the first 200 seconds of a recent drive where the rover speed when moving was about 3 cm/sec:
That's asking for the position every 10 msec, so evidently it doesn't get any more fractally than that. -------------------- |
|
|
|
|
|
|
Apr 2 2014, 04:03 PM
Post
#90
|
|
|
Senior Member Group: Members Posts: 2511 Joined: 13-September 05 Member No.: 497 |
QUOTE (jmknapp @ Apr 1 2014, 02:05 PM) It's more important for me to keep the map position more or less right, because when it deviates I definitely start getting emails. I don't know how the SPICE location is updated with information from outside the rover system. The rover basically can't know its absolute location in the Mars frame all by itself to good accuracy over a long time scale. The team uses map products that have the current site as the origin, so we never really use the SPICE location for anything in absolute terms as far as I know. Then there's the question of how well the orbital mosaic was georectified in the first place. All in all, I suspect that putting the location on a map in an automated fashion using just the SPICE would be difficult, if not impossible (but I haven't really tried it, so I can't be sure.) -------------------- Disclaimer: This post is based on public information only. Any opinions are my own.
|
|
|
|
|

|
Lo-Fi Version | Time is now: 1st May 2024 - 07:56 AM |
|
RULES AND GUIDELINES Please read the Forum Rules and Guidelines before posting. IMAGE COPYRIGHT |
OPINIONS AND MODERATION Opinions expressed on UnmannedSpaceflight.com are those of the individual posters and do not necessarily reflect the opinions of UnmannedSpaceflight.com or The Planetary Society. The all-volunteer UnmannedSpaceflight.com moderation team is wholly independent of The Planetary Society. The Planetary Society has no influence over decisions made by the UnmannedSpaceflight.com moderators. |
SUPPORT THE FORUM Unmannedspaceflight.com is funded by the Planetary Society. Please consider supporting our work and many other projects by donating to the Society or becoming a member. |
|