Philae landing on the nucleus of Comet 67P C-G |

  |
Philae landing on the nucleus of Comet 67P C-G |
 Oct 29 2014, 10:13 AM Oct 29 2014, 10:13 AM
Post
#61
|
||
 Member  Group: Members Posts: 241 Joined: 22-August 05 From: Stockholm Sweden Member No.: 468 |
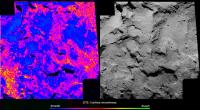
Another surface feature map I made to try to understand the obstacles Philae faces.
I have no real unit for surface roughness. (is there one?) but it is clear that you want to land in the blue areas.
|
|
 |
 
|
|
|
Oct 29 2014, 10:15 AM
Post
#62
|
|
|
Member Group: Members Posts: 107 Joined: 1-August 14 Member No.: 7227 |
QUOTE (Malmer @ Oct 29 2014, 01:44 AM)  I made a slopemap of site J I'd like to make an elevation map, but I can't find any suitable free program. I tried a couple of "disparity map generators", but I get ugly results... DMAG, StereoPlus... what else could I use? I already 3d-printed the whole comet, now I'd like to 3d-print the landing site too, before landing happens! |
|
|
|
|
Oct 29 2014, 10:30 AM
Post
#63
|
|
|
Member Group: Members Posts: 241 Joined: 22-August 05 From: Stockholm Sweden Member No.: 468 |
QUOTE (mcgyver @ Oct 29 2014, 11:15 AM) I'd like to make an elevation map, but I can't find any suitable free program. I tried a couple of "disparity map generators", but I get ugly results... DMAG, StereoPlus... what else could I use? I already 3d-printed the whole comet, now I'd like to 3d-print the landing site too, before landing happens! You have to have a resonable disparity generator. preferrably one that understands the two cameras orientation in respect to eachother. (or you will have to bring the pictures into alignment with some other software.) then you will have to tweak and tweak until you have the best possible settings. Then you will probably get something that is resonably ok on a mid to global scale. there will still be local noise. To combat that I would suggest that you use shape from shading to capture the fine details. |
|
|
|
|
Oct 29 2014, 10:31 AM
Post
#64
|
||
 Senior Member Group: Members Posts: 1084 Joined: 19-February 05 From: Close to Meudon Observatory in France Member No.: 172 |
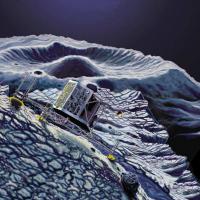
QUOTE (Malmer @ Oct 29 2014, 01:44 AM) I made a slopemap of site J using my terrain-model. (I'm assuming that the center of rotation is the gravityvector for the surface) Cyan=good Red=bad Thanks a lot Mattias for this very, very good work of yours ! If fact, we are not on Mars and there is not such a big number of 'bad' slopes, because in such a low-gravity object, we may 'land' in an hi-degree slope and stay there without sliding 'downwards', because we will screw into it. On the other hand, and because of such an eventuality, there is a strong possibility that the CIVA panorama looks very, very tilted with little horizon to be seen. Anyway, the horizon is so close that most of the interest of the CIVA images is in the looking 'downwards' to see tiny ground features around the lander that may sublimate/evaporate/move as we are closing to the Sun...
|
|
|
|
|
|
|
Oct 29 2014, 12:29 PM
Post
#65
|
|
|
Member Group: Members Posts: 241 Joined: 22-August 05 From: Stockholm Sweden Member No.: 468 |
QUOTE (vikingmars @ Oct 29 2014, 11:31 AM) Thanks a lot Mattias for this very, very good work of yours ! If fact, we are not on Mars and there is not such a big number of 'bad' slopes, because in such a low-gravity object, we may 'land' in an hi-degree slope and stay there without sliding 'downwards', because we will screw into it. On the other hand, and because of such an eventuality, there is a strong possibility that the CIVA panorama looks very, very tilted with little horizon to be seen. Anyway, the horizon is so close that most of the interest of the CIVA images is in the looking 'downwards' to see tiny ground features around the lander that may sublimate/evaporate/move as we are closing to the Sun... Happy to be of service! I'm more worried about the rough boulder fields. I think those are more troublesome than just a slope. But it is hard for me to really say much about. I would like the 10Km OSIRIS look of the area. I made my roughness map to get a feel for the different areas. Thankfully there is a lot of blue there. (and landing in a red area could with some luck work just as well) |
|
|
|
|
Oct 29 2014, 12:34 PM
Post
#66
|
|
|
Senior Member Group: Members Posts: 2346 Joined: 7-December 12 Member No.: 6780 |
QUOTE (Malmer @ Oct 29 2014, 12:13 PM) I have no real unit for surface roughness. (is there one?) ... There are several measures of surface roughness, most of them related to the usual statistical techniques to describe a distribution. It's mostly about amplitudes in a hipass version of a DTM, or by applying the shape by shading philosophy and assuming constant albedo, about amplitudes of the brightness in a hipass version of the greyscale image. Dimension will be length in many cases, unit in meters, e.g. for the standard deviation; for variance it would be square meters. You could now correlate those surface roughness values with probabilities for successful landings, to provide a probability map of successful landing constrained to the surface roughness aspect. Adding slope etc. to a simulation of landings could provide an overall probability map for successful landing with Monte Carlo methods as the underlying principle. Besides geometric surface properties, the consistence of the material will play a key role for successful anchoring. |
|
|
|
|
Oct 29 2014, 01:04 PM
Post
#67
|
|
|
Senior Member Group: Members Posts: 1084 Joined: 19-February 05 From: Close to Meudon Observatory in France Member No.: 172 |
QUOTE (Malmer @ Oct 29 2014, 01:29 PM) Happy to be of service! I'm more worried about the rough boulder fields. Absolutely agree with you Mattias. The big boulders are of a real concern, because : - they may made the lander touch them and flip over upon arrival ; - the lander may not be able to screw into them ; - the lander body may land on the very top of a boulder (big or small) and its landing mechanism may not be able to fold down enough on its sides to get a grip on it and/or the soil... It's really going to be a tough landing anyway ! |
|
|
|
|
Oct 29 2014, 01:12 PM
Post
#68
|
|
|
Member Group: Members Posts: 107 Joined: 1-August 14 Member No.: 7227 |
QUOTE (Malmer @ Oct 29 2014, 11:30 AM) You have to have a resonable disparity generator. preferrably one that understands the two cameras orientation in respect to eachother. (or you will have to bring the pictures into alignment with some other software.) Isn't an anaglyph enough? It is already aligned and I can extract images from it with StereoPhotoMaker. http://www.esa.int/var/esa/storage/images/...ull_image_2.png |
|
|
|
|
Oct 29 2014, 01:15 PM
Post
#69
|
|
|
Member Group: Members Posts: 107 Joined: 1-August 14 Member No.: 7227 |
QUOTE (Malmer @ Oct 29 2014, 01:44 AM) using my terrain-model. Is it available to the public? |
|
|
|
|
Oct 29 2014, 01:47 PM
Post
#70
|
|
|
Junior Member Group: Members Posts: 31 Joined: 1-July 13 From: Ithaca, NY Member No.: 6966 |
Questions from an interested non-expert:
I have read that Philae may still partly function if it lands in the wrong orientation (lying on its side, or similar). Is there the possibility that Philae may bounce off the surface, or even not contact the surface? In either of these scenarios, would Philae still be able to transmit back whatever data or images it has already taken? Is there a scenario other than spacecraft system failure where Philae would not be able to transmit data back (like landing upside down, perhaps)? Thanks. |
|
|
|
|
Oct 29 2014, 02:02 PM
Post
#71
|
|
|
Senior Member Group: Members Posts: 1084 Joined: 19-February 05 From: Close to Meudon Observatory in France Member No.: 172 |
QUOTE (blake @ Oct 29 2014, 02:47 PM) Questions from an interested non-expert: I have read that Philae may still partly function if it lands in the wrong orientation (lying on its side, or similar). Is there the possibility that Philae may bounce off the surface, or even not contact the surface? In either of these scenarios, would Philae still be able to transmit back whatever data or images it has already taken? Is there a scenario other than spacecraft system failure where Philae would not be able to transmit data back (like landing upside down, perhaps)? Thanks. Good question. The landing site is so chaotic... Franckly we don't know : so mainy possibilities of failures and so many possibility of successes... What is certain is that as soon as it touches the ground, the lander tries to screw its footpads into it and there is a small engine on top of it that pushes it downwards to maintain a contact as long as the grip is not firmy done... We'll know for sure in what shape the lander is upon arrival on the 12th ! Hope for the best ! 
|
|
|
|
|
Oct 29 2014, 04:09 PM
Post
#72
|
|
|
Senior Member Group: Members Posts: 2346 Joined: 7-December 12 Member No.: 6780 |
QUOTE (blake @ Oct 29 2014, 03:47 PM) In either of these scenarios, would Philae still be able to transmit back whatever data or images it has already taken? Is there a scenario other than spacecraft system failure where Philae would not be able to transmit data back (like landing upside down, perhaps)? NSSDC about Philae: QUOTE The lander will communicate with the Rosetta spacecraft via a 1 W S-band transmitter. S-band communication usually is rather tolerant in terms of pointing. Although I didn't find reliable information about whether the (two?) Philae S-band antennas (at least taken together) are omnidirectional. The other instruments may shield the radio waves in some directions. But if Philae doesn't vanish in some deep gap, I'm optimistic, that communication will be possible in some directions, at least, as long as the batteries are charged. Most descent data will be transmitted before touchdown; thus we'll get some infos of the descent phase, at least. |
|
|
|
|
Oct 29 2014, 05:14 PM
Post
#73
|
|
 Senior Member Group: Members Posts: 4246 Joined: 17-January 05 Member No.: 152 |
QUOTE (Malmer @ Oct 29 2014, 01:44 AM) (I'm assuming that the center of rotation is the gravityvector for the surface) What do you mean by "centre of rotation"? What point do you point the gravity vectors to? I suppose that for these purposes, and without a mass distribution model, you could choose that point such that some average slope over the area of the plot is close to zero. Of course that may not be very accurately true. |
|
|
|
|
Oct 29 2014, 05:42 PM
Post
#74
|
|
|
Founder Group: Chairman Posts: 14432 Joined: 8-February 04 Member No.: 1 |
QUOTE (Gerald @ Oct 29 2014, 09:09 AM) S-band communication usually is rather tolerant in terms of pointing. Whilst the lower frequencies are less fussy regarding pointing - the predominant factor in required pointing accuracy is antenna design - NOT frequency. The S-Band relay from Huygens to Cassini had a beamwidth of only 2.3-2.4 degrees because it used Cassini's HGA. http://descanso.jpl.nasa.gov/DPSummary/Des...3--Cassini2.pdf ( page 8 ) Whereas Deep Impact's probe-flyby relay used S-Band but patch-antennas that were in essence omnidirectional and managed 64kbps downlink at 8,000km range. |
|
|
|
|
Oct 29 2014, 06:00 PM
Post
#75
|
|
 Senior Member Group: Members Posts: 1421 Joined: 26-July 08 Member No.: 4270 |
Great new, close-up image of that smoothe area on the "bottom" of the larger lobe. Looks like they also give us a mosaic, too.
http://www.esa.int/spaceinimages/Images/20..._October_NavCam -------------------- -- Hungry4info (Sirius_Alpha)
|
|
|
|
|

|
Lo-Fi Version | Time is now: 29th April 2024 - 06:50 PM |
|
RULES AND GUIDELINES Please read the Forum Rules and Guidelines before posting. IMAGE COPYRIGHT |
OPINIONS AND MODERATION Opinions expressed on UnmannedSpaceflight.com are those of the individual posters and do not necessarily reflect the opinions of UnmannedSpaceflight.com or The Planetary Society. The all-volunteer UnmannedSpaceflight.com moderation team is wholly independent of The Planetary Society. The Planetary Society has no influence over decisions made by the UnmannedSpaceflight.com moderators. |
SUPPORT THE FORUM Unmannedspaceflight.com is funded by the Planetary Society. Please consider supporting our work and many other projects by donating to the Society or becoming a member. |
|